村田杯大學生電子設計論文大賽獲獎名單揭曉

由《電子產(chǎn)品世界》雜志社和日本村田制作所聯(lián)合舉辦的“村田杯大學生電子設計論文大賽”經(jīng)過半年的準備期和近兩個月評審階段最終落下帷幕,多個獎項各有其主。最終,來自哈爾濱工業(yè)大學機器人研究所徐濟安的論文《基于MEMS陀螺的微小型移動機器人嵌入式導航定位系統(tǒng)的研究》獲得專家青睞,獲得一等獎。
本文引用地址:http://www.104case.com/article/88215.htm本次競賽面向全國在校大學生,由于村田制作所的產(chǎn)品應用范圍廣泛,因此最終參賽作品涉及了幾乎所有電子產(chǎn)品領域。從專家反饋情況來看,大賽體現(xiàn)出了相當高的電子設計水平,也反映出現(xiàn)在大學生關注的電子設計領域正在逐漸寬泛起來。本次大賽具體獲獎名單如下。
一等獎 哈爾濱工業(yè)大學機器人研究所 徐濟安
二等獎 清華大學 代剛 四川大學 黃勁松 防空兵指揮學院 李剛
三等獎 復旦大學 溫立 華僑大學 楊亮亮 廣東工業(yè)大學 朱小輝
南昌航空大學 何東暉 上海交通大學 馬明煌
鼓勵獎 阿日貢巴彥爾 陳少華 李亮 馬翼龍 唐和國
高嵩 劉小青 高強 成智剛 俞斌
鄧先武 苗強 陳力 田德麗 章歡
一等獎論文節(jié)選
基于MEMS陀螺的微小型移動機器人嵌入式導航定位系統(tǒng)的研究
■ 徐濟安 哈爾濱工業(yè)大學機器人研究所 哈爾濱 (150001)
圖1所示為本文構建的導航定位系統(tǒng)總體框圖,可以分為5個部分:(1)航向測量單元:采用村田公司的新型壓電振動MEMS陀螺ENC-03R作為系統(tǒng)的水平方向航向角的測量傳感器。(2)位置測量單元:采用一個外加光電碼盤的隨動輪作相對位置跟隨測量,并采用Altera公司的EPM7032型CPLD對隨動輪正交光電編碼器的信號進行處理。(3)軟件平臺及信號處理單元:基于mC/OS-II嵌入式實時操作系統(tǒng)進行任務劃分和調度,實現(xiàn)陀螺數(shù)字信號處理、插值升頻、信息解算等處理算法。(4)中央硬件平臺:采用NXP公司的基于ARM7TDMI核的高性能主流處理器LPC2148,所有的運算及處理算法和硬件外設控制均由核心處理器實現(xiàn)。(5)通信單元:本系統(tǒng)可作為獨立的移動機器人導航定位子系統(tǒng),基于雙緩沖隊列并遵循自定的通信協(xié)議與上位機(即機器人上層控制器)進行實時、高速率串行通信。
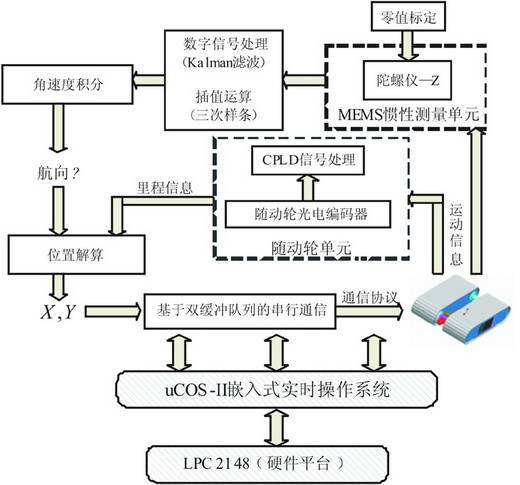
圖1 系統(tǒng)組織架構框圖








評論