一種嵌入式微調(diào)度器的實(shí)現(xiàn)方法
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對面交流
海量資料庫查詢
智能儀表是自動(dòng)控制技術(shù)的重要組成部分。隨著智能儀表在工業(yè)控制、通信和汽車電子中的廣泛應(yīng)用。
本文引用地址:http://www.104case.com/article/85653.htm智能儀表逐漸向數(shù)字化、網(wǎng)絡(luò)化、智能化方向發(fā)展;同時(shí),智能儀表復(fù)雜度不斷增加,對實(shí)時(shí)性要求幾乎達(dá)到了苛刻的程度。在編程方式和代碼重復(fù)利用等方面,超循環(huán)方式的智能儀表越來越不能滿足資源管理和系統(tǒng)的實(shí)時(shí)要求,迫切需要在中低端智能儀表中加入一些輕量級的多任務(wù)管理的調(diào)度器或?qū)崟r(shí)操作系統(tǒng)。本文根據(jù)智能儀表對嵌入式操作系統(tǒng)的特殊要求設(shè)計(jì)了一種新的任務(wù)調(diào)度算法,并實(shí)現(xiàn)了一個(gè)應(yīng)用于中低端儀器儀表的嵌入式微調(diào)度器。
1 實(shí)時(shí)任務(wù)調(diào)度的一般方法和策略
在實(shí)時(shí)操作系統(tǒng)中,系統(tǒng)把應(yīng)用分為行為可以預(yù)知的、功能確定的多個(gè)任務(wù)。每個(gè)任務(wù)一般處于3種狀態(tài);執(zhí)行狀態(tài)、就緒狀態(tài)和等待狀態(tài)(有的操作系統(tǒng)還具有掛起和休眠狀態(tài))。為了滿足實(shí)時(shí)性要求,系統(tǒng)根據(jù)一定的原則選擇合適的任務(wù)執(zhí)行。
常見的任務(wù)調(diào)度算法分為靜態(tài)算法和動(dòng)態(tài)算法兩類:
①靜態(tài)算法:在系統(tǒng)在運(yùn)行前(即系統(tǒng)初始化階段),就為所有的任務(wù)分配固定的優(yōu)先級別,在系統(tǒng)執(zhí)行過程中優(yōu)先級保持不變。當(dāng)一個(gè)事件發(fā)生時(shí),調(diào)度程序只需要查就緒表,就可以調(diào)度哪個(gè)任務(wù)處于運(yùn)行狀態(tài)。
②動(dòng)態(tài)算法:在系統(tǒng)初始化時(shí)初步分配一個(gè)優(yōu)先級。每一個(gè)任務(wù)在運(yùn)行時(shí)可以改變它的優(yōu)先級。
當(dāng)前的嵌入式操作系統(tǒng)一般采用靜態(tài)算法,只在處理優(yōu)先級反轉(zhuǎn)時(shí)臨時(shí)采用動(dòng)態(tài)優(yōu)先級算法。
2 儀器儀表對調(diào)度算法的要求
為了提高儀表的可靠性,實(shí)現(xiàn)高性能、多功能應(yīng)用,應(yīng)用于智能儀表的調(diào)度器必須滿足以下要求:
①良好的實(shí)時(shí)性。智能儀表必須實(shí)時(shí)地對通過現(xiàn)場總線采集的數(shù)據(jù)進(jìn)行數(shù)字編碼,通過人機(jī)界面進(jìn)行顯示,并把用戶對被監(jiān)控系統(tǒng)的參數(shù)設(shè)置實(shí)時(shí)地傳送給執(zhí)行部件。
②基于優(yōu)先級的任務(wù)調(diào)度策略。在復(fù)雜的大規(guī)模應(yīng)用中需要使用大量的傳感器、執(zhí)行器和控制器等,對其數(shù)據(jù)顯示和傳輸控制需要通過不同優(yōu)先級的任務(wù)來控制。
③低消耗要求。隨著應(yīng)用環(huán)境的復(fù)雜化,對智能儀表的計(jì)算能力要求越來越高,勢必要求調(diào)度器必須占用較少的系統(tǒng)資源。
④低成本要求。為了降低成本,在硬件設(shè)計(jì)上,存儲器的大小是成本控制的一個(gè)方面。因此,要求提供的調(diào)度器必須具備小內(nèi)核以減小存儲空間。
此外,還要求調(diào)度器必須有精確定時(shí)的功能,也就是事件驅(qū)動(dòng)和時(shí)鐘驅(qū)動(dòng)相結(jié)合,以滿足智能儀表中周期性任務(wù)執(zhí)行和突發(fā)性任務(wù)執(zhí)行的需要。
3 嵌入式微調(diào)度器的設(shè)計(jì)與實(shí)現(xiàn)
根據(jù)智能儀表對調(diào)度算法實(shí)時(shí)性、多任務(wù)、低消耗的要求,本文提出了一種新的靜態(tài)優(yōu)先級,單任務(wù)隊(duì)列、具有4種任務(wù)狀態(tài)的非搶占式調(diào)度的輕量級任務(wù)調(diào)度算法,并根據(jù)這種算法實(shí)現(xiàn)了應(yīng)用于智能儀表的調(diào)度器。該算法的特點(diǎn)是以任務(wù)在任務(wù)控制塊數(shù)組中的相對位置表示優(yōu)先級高低,任務(wù)的狀態(tài)和延時(shí)量使用統(tǒng)一的任務(wù)狀態(tài)字,在少量任務(wù)的輕量級應(yīng)用中具有很好的時(shí)間和空間性能。
3.1 任務(wù)的狀態(tài)
在本調(diào)度器中任務(wù)有4種狀態(tài):就緒狀態(tài)、運(yùn)行狀態(tài)、等待狀態(tài)和掛起狀態(tài)。內(nèi)存中的任務(wù)必須處于這4種狀態(tài)之一。
就緒狀態(tài):指任務(wù)運(yùn)行的時(shí)間條件和資源條件都滿足,等待調(diào)度算法選擇最合適的任務(wù)進(jìn)入就緒狀態(tài)。任務(wù)一旦建立就處于就緒狀態(tài),這一點(diǎn)和μC/OS-II相同。
運(yùn)行狀態(tài):是當(dāng)前時(shí)刻任務(wù)占有CPU資源正在運(yùn)行的狀態(tài)。本調(diào)度算法選擇進(jìn)入就緒任務(wù)隊(duì)列中優(yōu)先級最高的任務(wù)運(yùn)行。任何時(shí)刻只能有一個(gè)任務(wù)處于運(yùn)行狀態(tài)。
等待狀態(tài):如果任務(wù)需要等待一段時(shí)間才能運(yùn)行,那么這個(gè)任務(wù)當(dāng)前處于等待狀態(tài)。使任務(wù)延遲一段時(shí)間可通過調(diào)用Os_TasK_Delay()函數(shù)實(shí)現(xiàn)。調(diào)度器在每個(gè)系統(tǒng)時(shí)鐘節(jié)拍檢查任務(wù)延遲時(shí)間,一旦任務(wù)定義的延遲時(shí)間到,就使任務(wù)進(jìn)入就緒狀態(tài)。
掛起狀態(tài):正在運(yùn)行的任務(wù)需要等待某一事件的發(fā)生,如果該事件沒有發(fā)生那么任務(wù)就處于掛起狀態(tài)。事件的發(fā)生可能來自另外一個(gè)任務(wù),也可能來自中斷服務(wù)程序。
除此之外,系統(tǒng)還可能處在中斷服務(wù)狀態(tài)。這是一種特殊的運(yùn)行狀態(tài),當(dāng)系統(tǒng)響應(yīng)中斷時(shí),正在執(zhí)行的任務(wù)被掛起,中斷服務(wù)程序控制了CPU的使用權(quán),系統(tǒng)就進(jìn)入中斷服務(wù)狀態(tài)。
其中,空閑任務(wù)優(yōu)先級最低,而且永遠(yuǎn)處于就緒狀態(tài),而且當(dāng)所有的任務(wù)都在等待事件發(fā)生或者延遲時(shí)間結(jié)束時(shí),操作系統(tǒng)就會執(zhí)行空閑任務(wù)。
3.2 調(diào)度器核心數(shù)據(jù)結(jié)構(gòu)
3.2.1 任務(wù)控制塊和任務(wù)控制塊列表
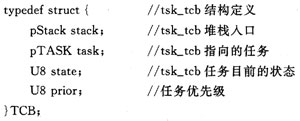
任務(wù)控制塊由任務(wù)堆棧、任務(wù)入口地址、任務(wù)狀態(tài)字和任務(wù)優(yōu)先級4個(gè)部分組成。任務(wù)堆棧用于保護(hù)被中斷的現(xiàn)場數(shù)據(jù);任務(wù)入口地址是指向任務(wù)程序的指針,用于指定任務(wù)所進(jìn)行的操作;任務(wù)狀態(tài)字用來表示任務(wù)當(dāng)前的狀態(tài)和延遲的時(shí)間間隔;任務(wù)優(yōu)先級表示就緒列表中的哪個(gè)任務(wù)可以優(yōu)先進(jìn)入運(yùn)行狀態(tài)。
在整個(gè)調(diào)度過程中使用一個(gè)全局的任務(wù)控制塊數(shù)組來表示任務(wù)控制塊列表。每個(gè)任務(wù)使用唯一一個(gè)任務(wù)控制塊表示,任務(wù)的優(yōu)先級通過任務(wù)控制塊在任務(wù)控制塊數(shù)組中的相對位置來表示。每個(gè)任務(wù)有且僅有一個(gè)優(yōu)先級,所以任務(wù)的優(yōu)先級也可以用任務(wù)的ID號來表示。任務(wù)控制塊結(jié)構(gòu)如下








評論