采用視頻的無線激光定位設備的設計

隨著CCD(Charge Coupled Device)越來越廣泛地被應用到工業、軍事、民用行業。采用CCD攝像頭作為裝置的前端圖像傳感器并結合其他硬件電路對被測圖像信息進行快速采樣、傳輸及數據處理的應用系統正日益受到人們的關注。本文所介紹的是一種帶有CCD攝像器件的視頻信號處理裝置,主要用于投影屏幕上目標點的坐標測量和光標定位。
本文引用地址:http://www.104case.com/article/82920.htm1.系統總體設計方案
系統總體設計如圖1所示,激光筆發射到被測畫面的光點被CCD攝像器件接收,CCD攝像器件輸出視頻信號給同步分離電路和整形電路。利用同步分離電路后,可從視頻信號中得到行同步信號和場同步信號和奇偶信號,行同步和場同步信號被送到計數電路。視頻信號經過整形電路后得到光信號,光信號也被送往計數電路,計數電路處理后輸出光點的二維位置信息,此信息經單片機處理后由串口傳輸到計算機,計算機通過軟件編程實現光標的定位并模擬鼠標的單雙擊功能。
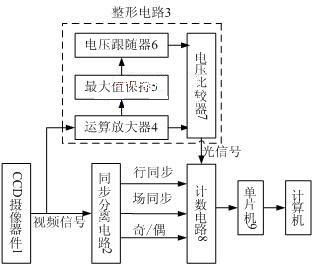
圖1 電路總體結構圖
2.系統硬件電路設計
2.1整形電路
如圖2所示,CCD攝像器件1輸出的視頻信號被直接傳送到運算放大器4放大,運算放大器4輸出的信號一路作為電壓比較器7的一個輸入,另一路被送到最大值保持電路5,最大值保持電路5主要包括電壓跟隨器5、電容C1、穩壓管Dz1 三個器件,當有信號從電壓跟隨器5A連續輸出時,由于二極管D1的存在,電容C1不斷充電,電壓不斷增加,直到信號的最大值到來,這時C1的電壓也增加到最大值,之后再有信號到來時由于其電壓達不到加在電容兩端的電壓,因而電容不再充電,電壓保持不變。當圖中所示的場同步信號到來時,穩壓管Dz1反相導通,電容才迅速放電,再有信號從電壓跟隨器5A 輸出,電容又開始重新充電。通過這種設計,便可以從每場視頻信號中提取出最強的信號,并將這個值通過電壓跟隨器6輸出到電壓比較器7的另一個輸入端,電壓比較器7輸出的信號即為從視頻信號中提取出的光信號,并且該光信號存在這樣的特點:對于每一場視頻信號而言,只有當當前信號值大于以往信號值時,光信號輸出為高電平,否則輸出為低電平。視頻信號最大值過后,光信號輸出時刻保持在低電平。在圖2中,電壓跟隨器6相當于一個高輸入阻抗元件,可以防止電容C1放電過快。電源VCC提供一個鉗位電壓。
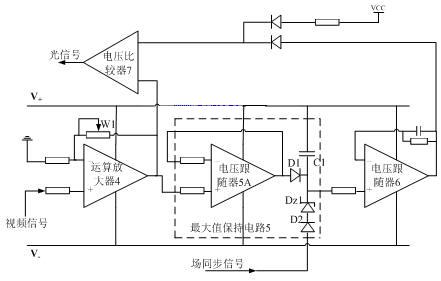
圖2 整形電路詳細原理圖
2.2同步分離電路
視頻信號是反映圖像內容的電視信號, 它的電壓高低表示圖像像素的明暗程度。由于圖像是隨機性的, 因此視頻信號電平也在一定范圍內隨機起伏。視頻信號是在電子掃描作用下, 由攝像頭將明暗不同的景象轉換為相應的電信號, 然后經信號通道傳送出去。目前在傳送視頻信號時,是把影像信號,消隱信號和復合同步信號三者按一定比例結合在一起發送的。我國采用的電視信號是隔行掃描(PAL)制式(黑白為CCIR),行頻為15625Hz,行同步脈寬為4.7μs;場頻為50 Hz,場同步脈寬為160μs[1]。
準確分離視頻信號對系統的成功至關重要,在該系統中視頻信號同步分離可以選用芯片LM1881來實現,輸入為滿足CCIR標準的視頻信號,輸出有復合同步信號、場同步信號、奇偶場標志信號。其中,復合同步信號中包含了周期為64μs的行同步信號和場回掃期間的周期為32μs的場均衡信號、場同步信號[2]。
2.3計數電路
2.3.1光信號行計數
選擇20MHz的晶振作為行計數器的計數時鐘脈沖輸入,計數器的時鐘頻率實際上決定了視頻信號每一行的采樣點的數量,即每行水平的數字分辨率。行周期64μs,頻率15625Hz,每行的采樣點為20M/15625=1280,除去行消隱和行同步的時間,每行的有效采樣點可達1000點以上。為了保證計數器不會溢出,需用二進制地址10位,因此我們選擇采用12位計數器。由光信號和場同步脈沖通過與非門接到計數器的清零引腳,由20MHz時鐘信號和行同步脈沖通過與非門接到計數器時鐘脈沖輸入引腳。當光信號到來時計數器開始計數,下一行同步脈沖到來時,會停止計數,同時觸發鎖存器,存儲計數器中的數值,至此就獲得了光點的行坐標。下一場同步脈沖到來時,會將計數器清零,開始新一行的點坐標測量[3]。圖4是實現行計數的波形示意圖。
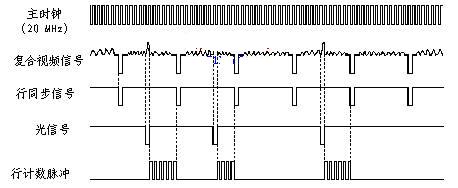
圖3 行計數的波形示意圖
2.3.2 光信號場計數
場計數的工作原理與行計數類似,只是計數器時鐘脈沖輸入改為行同步脈沖。光信號到來時開始計數,當場同步脈沖到來時停止計數,觸發鎖存器,存儲計數器中的數值,至此就獲得了光點的場坐標。同時場同步脈沖會將計數器清零,開始新一場的點坐標測量。



評論