實現可靠的高性能數字電源
 加入技術交流群
加入技術交流群

掃碼加入
和技術大咖面對面交流
海量資料庫查詢
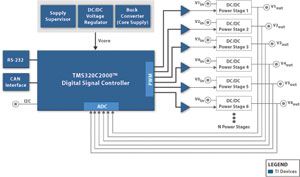
在研究數字電源轉換設計時,設計人員還必須考慮為控制電路和DSC本身供電的輔助電源。圖2中的DSC支持單輸入電壓并且具備必需的電源管理功能,從而簡化了輔助電源電路,提高了可靠性。
本文引用地址:http://www.104case.com/article/82434.htm在諸如AC至DC轉換器的某些應用中,器件可執行AC至DC轉換控制以及諸如功率因數校正(PFC)等功能。支持增加諸如PFC等功能的數字PWM功能模塊是PWM互補輸出對的獨立時基。通過使用“備用”PWM信號和運行在DSC上的軟件即可實現上述功能,無需外部PFC芯片,從而進一步增加了電源的可靠性。
實現數字回路
典型拓撲結構的數字控制回路示例將說明DSC或其他拓撲結構的選擇會對設計產生怎樣的影響。圖3顯示了一個同步降壓轉換器。這種結構之所以稱為同步降壓轉換器是因為晶體管Q2的開關與主開關Q1同步。同步降壓轉換器的設計理念是將MOSFET用作與標準整流器相比具有極低正向壓降的整流器。當二極管的電壓下降時,降壓轉換器的整體效率將會提高。同步整流器(MOSFET Q2)還需要一個與主PWM信號互補的PWM信號。Q2會在Q1關斷時導通,反之亦然。這種PWM形式被稱為“互補的PWM”模式。
圖3 同步降壓轉換器
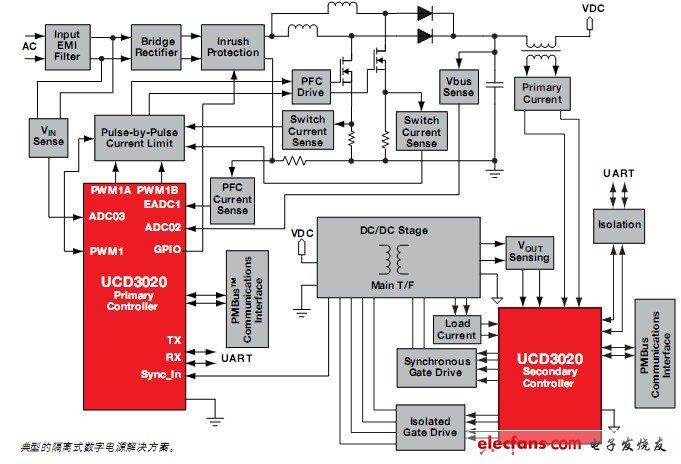
圖4 SMPS控制系統示例
圖4描繪了一個SMPS控制回路示例。最需要注意的是圖中的每個模塊都有相關的延時。采樣/保持電路通常每2到10微秒采樣一次,且ADC需要約500納秒將模擬反饋信號轉換為數字值。
比例-積分-微分(PID)控制器是運行在DSC上的一個程序,其計算延時約為1至2微秒。該控制器的輸出被轉換為一個PWM信號,由該信號驅動開關電路。若在設定新的占空比后,PWM發生器不能立即更新其輸出,就會引入相當大的延時。此外,根據所用的器件和電路的設計,晶體管驅動器和相關晶體管引入的延時在50納秒到1微秒。輸出濾波器通常由電感和電容電路構成,同樣會導致較大的延時。
與模擬反饋信號轉換、處理器的數字計算以及數字PWM信號輸出給功率晶體管的延時相關的所有延時都被加到采樣速率延時。主控制回路的有效采樣頻率是控制器延時和采樣延時的倒數。在本示例中,控制延時是4.1微秒,因此采樣速率大約為244 kHz。
控制器帶寬是控制器的有效采樣速率與過采樣比之商。一般來說,回路穩定工作要求6至10倍的過采樣。在本示例中,需要6倍的過采樣比來實現所需的回路性能。估計控制器帶寬為40 kHz。在控制算法中加入前饋控制項可提升控制器的性能,使其性能超越帶寬為40 kHz的傳統PID控制器。
了解了這么一個示例以后,讓我們看看采用這樣的基本回路如何達到電源應用的某些架構需求。要防止PWM信號的波動對控制器產生影響,要求PWM重載頻率應至少比DSC帶寬高4或5倍。本示例中兩者的比為10:1,這樣就要求將PWM頻率設置為400 kHz。一旦設置了PWM重載頻率,就可據此確定PWM分辨率。
許多供應商和客戶均對“PWM分辨率”這一術語感到困惑。PWM分辨率并非指特定計數器的寬度,而是指在一個PWM周期內的計數值(可能的最小PWM時間片段)。在電源行業中,PWM分辨率指定為一個PWM周期中可達到的最小時間增量,通常單位為納秒。如果DSC的數字PWM模塊不具有足夠的分辨率,控制系統(硬件或軟件)將會使用dither(擾動)處理方法對輸出進行調整以實現期望的平均輸出。在電源應用中,PWM擾動會導致電流紋波問題并使控制進入不理想的“極限循環”工作模式。
PWM分辨率 = PWM計數器頻率 / PWM頻率
已經為設計選擇好了PWM頻率,還必須確定所需的PWM分辨率。本示例要求約11位的分辨率,因此PWM時鐘必須工作在約1 GHz的頻率下。
控制算法由SMPS軟件實現,其中的核心就是PID循環。PID軟件通常比較小,只有1到2頁的代碼,但其執行速率非常高,通常每秒可以進行幾十萬次迭代!
這樣高的迭代速率要求PID軟件程序必須足夠高效以使性能最佳。匯編器提供了確保“代碼緊湊”的好方法。
PID軟件的執行時間確定了兩個系統性能指標:
1. PID迭代速率,由它確定控制回路更新之間的時間。
2. PID執行時間,是反饋采樣和PWM更新之間的關鍵路徑。
ADC以固定的時間間隔中斷,供DSC執行PID控制循環。任何可在“閑置循環”內執行的系統函數均應在PID控制軟件循環外執行。諸如升壓/降壓、錯誤檢測和前饋計算等函數,以及通信支持程序均可在閑置循環內執行。任何其他由中斷驅動的進程(比如通信)的優先級必須低于PID循環。
設計數字電源轉換軟件時可遵循如下指導方針:
.推薦采用匯編語言編寫執行速率極快的內部PID循環
.PID執行時間會影響穩定性
.PID迭代速率會影響穩定性
.PID處理器的負載不超過其額定值的66%
.在閑置循環中執行“輔助函數”。
數字電源轉換需要某些獨特的ADC采樣功能,來實現不需要過多處理功能的實際應用。系統中實現了一個控制回路,DSC在該回路中通過PWM狀態驅動被采樣的信號。系統了解何時采樣感興趣的信號以提供最多的信息。圖5說明了在PWM驅動信號的精確位置觸發ADC轉換的重要性。
圖5 異步ADC采樣示例
要使電源轉換器應用的設計成本最低,最好是能夠對系統中接近地電位的位置測量電壓和/或電流。這樣省去了處理直接監視通過電感“L”的電流所需的大共模電壓的電路,從而降低了成本和復雜性。
在本例中,當晶體管導通時電感電流流經晶體管。應當測量晶體管關斷時的瞬態峰值電流。如果用戶無法在正確的時候捕捉電流采樣(比如采樣延時),晶體管將處于“關斷”狀態。若在晶體管關斷時采樣,因為沒有電流流經檢測電阻“R”,因而測量不到電流。采樣延時比測得不良數據更糟糕——因為根本就沒有數據!








評論