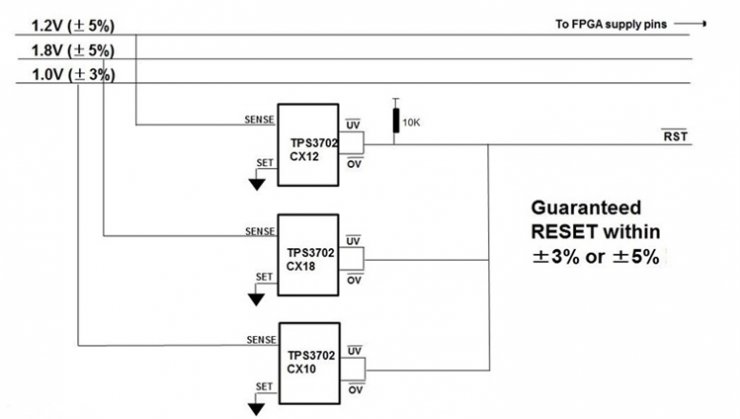
用復位發生器和電壓監控器來避免故障

優點:PLD對復位、中斷的產生,以及關閉Flash寫信號有很大的靈活性,能有效地進行電源定序。因為這個電路獨立于DC-DC轉換器的輸出電壓,它可以作為標準的解決方案用于各種應用。
本文引用地址:http://www.104case.com/article/82064.htm缺點:電壓監控的精度問題。在大多數轉換器里,PG電路的閾值精度在5% 和10%之間。由于這個容限差錯,不可能監控5 %的電壓變化。
此外,這種方法不能監控輸入電壓。因此在電路板上電壓關閉的過程中不能為微處理器提供充分的時間。
監控輸入電壓
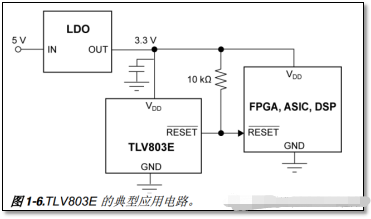
圖3展示了監控電路使用低成本復位發生器只監控輸入電壓。不對DC-DC轉換器進行監控。
這個方法的優點是為電壓監控提供低成本解決方案,在開啟和關閉電源時處理復位產生。這個方法的缺點是無法確定電路板上其余的電源是否工作正常。因此,不能防止差錯,例如由于任何電路板上DC-DC轉換器的故障而引起破壞Flash數據。
用含有ADC的微處理器監控電源
圖4的電路中,用含有集成了ADC的微處理器來監控和產生復位。微處理器中的電壓監控軟件代碼用ADC來輪流測量每個電源電壓,把存儲的電壓閾值和數字代碼相比較,以確定電源是否有差錯。電壓監控軟件通常用5到10毫秒的時間對中斷信號做出響應。
這個方法的優點是具有靈活性,能精確地設置電壓監控閾值(僅限于ADC解決方案)。此外,相同的方法可以作為標準用于各種設計,因為能通過軟件對電路板進行特殊的設置。
這個方法的缺點是:故障檢測太慢,通常需要外部的帶隙參考來滿足精度的要求。
故障檢測中的主要延時是由于引入監控,大約要5~10ms的時間。監控軟件也要加入一些延時,因為時序監控和平均要求。大多數DC-DC轉換器有故障時,或者關閉電源時,電壓下降到可接受的范圍之下大約要2~5ms。5~10ms的故障檢測延時太慢,只留給處理器一個很短的時間來進行處理。
在大多數微控制器中,用ADC監控電壓的片上參考電壓的容限誤差為2%~4%,因此需要外部集成電路的參考電壓的監控精度提高到1%左右。
監控器和復位產生電路的實例
圖5為可編程電源管理器件,Lattice POWR607用于監控輸入電壓和電路板上產生的電壓。POWR607能監控多達6個電壓,使用12微秒的故障檢測延時片上可編程閾值比較器。典型的電壓閾值精度是0.5%。比較器的輸出連接到片上PLD。用PLD實現的邏輯產生控制信號。可編程定時器產生持續一段時間的脈沖復位信號。POWR607是在系統可編程的,配置存儲在片上E2CMOS存儲器中。
監控器和復位產生電路的優點
圖2 用PLD的電壓監控
圖3 監控輸入電壓
這個設計監控電路板上的電源電壓和輸入電源,組合了圖2和圖3的優點。可編程閾值功能具有圖4中用微控制器的優點。因為典型的閾值精度是0.5%,這個電路沒有圖2和圖4中電路的缺點。片上PLD提供與圖2電路中相同的電源定序靈活性。
圖4 用微處理器監控電壓
評估各種電路,很明顯圖5中使用Lattice電源管理芯片提供最可靠的監控器和復位產生電路。
圖5 用可編程電源管理集成電路進行電壓監控
參考文獻:
1. isp POWR607. Lattice Data Sheet. 2006




評論