一種野外探測車設計方案,提供完整軟硬件實現(xiàn)流程

一、設計思路
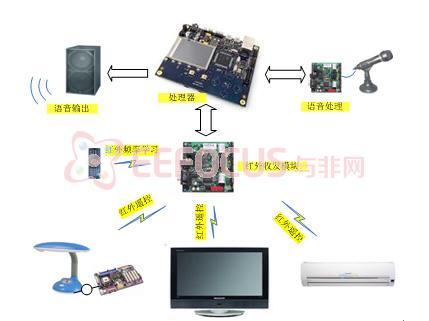
本文引用地址:http://www.104case.com/article/280600.htm基于AVR單片機的野外探測車大體包括機械部分,電子部分和軟件部分三部分。細分為車體基體模塊、主運動模塊、輔運動模塊,電源模塊、主處理模塊、運動控制模塊、視頻采集模塊、傳感器采集模塊、無線通訊模塊、上位機模塊。
二、方案設計
1車體基體模塊
車體基體模塊是機器人的硬件支撐,固定著機器人的絕大部分部件,包括支架和安裝座,通過鋁合金膠接鉚接而成。鋁合金剛性好,可以承受較大的載荷,便于加工且質量有保證。
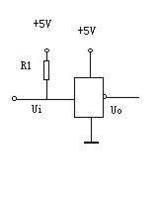
2供電模塊
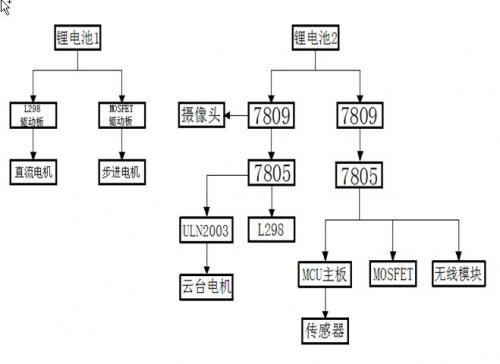
3主處理模塊
MCU為EVK1100,實現(xiàn)數(shù)據(jù)處理,傳感器數(shù)據(jù)采集,電機控制和無線模塊協(xié)同。
接受傳感器的數(shù)據(jù),處理后,通過串口發(fā)送給無線模塊,同時接受串口傳遞的控制信號,經(jīng)過處理后,進行響應,控制運動控制模塊,完成相應動作
4 傳感器采集模塊
傳感器模塊可以根據(jù)需要搭載相關類型傳感器。可以掛載GPS導航儀,進行全球范圍內精確定位; 還可以掛載生命探測器,進行更為高效的搜救活動; 還可以掛載陀螺儀,協(xié)助調整機器人姿態(tài),順利完成越障任務。
5 傳感器采集模塊
本機器人攜帶溫度傳感器和瓦斯傳感器,視頻采集模塊,包括無線攝像頭,接收器,視頻采集卡。
6 無線通信模塊
無線通信模塊采用高精度、高靈敏度的PTR6000無線通信模塊。該模塊采用全雙工工作模式,傳輸距離可達500m。一端連接上位機,一端連接機器人。
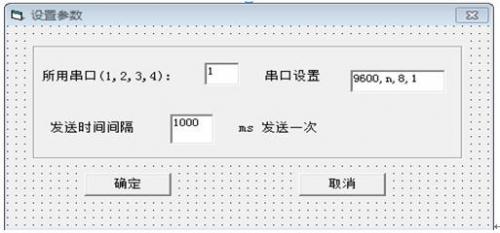
7 上位機模塊
上位機端接口為一應用程序,該程序采用Microsoft公司的Visual Basic 6.0 編寫,主要用于數(shù)據(jù)的接收顯示和控制信號的傳遞。串口通信采用Microsoft公司的MSCoom控件,波特率設置窗口如下。
視頻聲音顯示部分采用StkATVAP,可以顯示無線攝像頭采集的視頻聲音信號,并且可以捕獲保存。傳感器數(shù)據(jù)顯示下位機發(fā)送的傳感器信號,正如傳感器部分所介紹的,還可以根據(jù)需要對其增減。

三、主要創(chuàng)新點
1 采用全雙工無線通信技術。
2上位機程序功能強大,人機界面友好。
3 可以根據(jù)具體情況選擇無線或有線控制。
4 加載無線攝像頭可傳回視頻和聲音信號,且視頻信號可以捕獲,存儲。
風速傳感器相關文章:風速傳感器原理 攝像頭相關文章:攝像頭原理



評論