如何讓電動大巴更可靠充電

(2)模擬充電機對BMS仿真測試模式:
本文引用地址:http://www.104case.com/article/273774.htm在這個模式下,CANScope模擬充電機,對被測的電動汽車BMS系統進行協議一致性測試,如圖5所示。
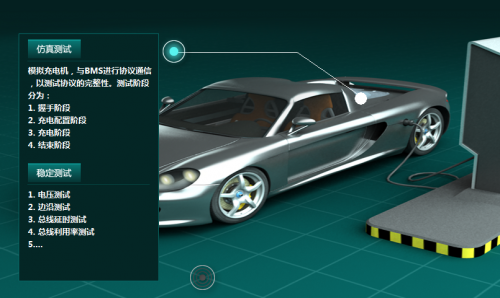
圖5 模擬充電機對BMS仿真測試
在這個模式下,用戶需要先填入需要模擬的充電機的參數,比如目標地址、源地址、充電機編號、最高/最低輸出電壓、最大輸出電流、電壓/電流輸出值、累計充電時間等等參數。然后勾選要仿真的充電過程,點擊開始即可開始測試。如圖6所示。
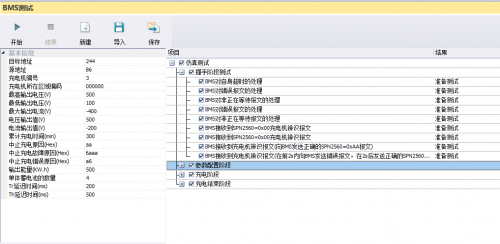
圖6 模擬充電機對BMS仿真測試細節
本測試是按國標中的通信協議進行分支探測,檢驗被測BMS系統的程序是否充分考慮到各種異常情況,在各種流程分支(包括異常分支)中是否能作出正確的響應。
比如充電握手階段中,CANScope會發送錯誤的報文,以檢測被測BMS系統對錯誤的報文處理是否正確,是否會導致充電中斷甚至充電機死機等情況。
(3)模擬BMS對充電機測試模式:
在這個模式下,CANScope模擬電動汽車BMS系統,對被測的充電機進行協議一致性測試,如圖7所示。
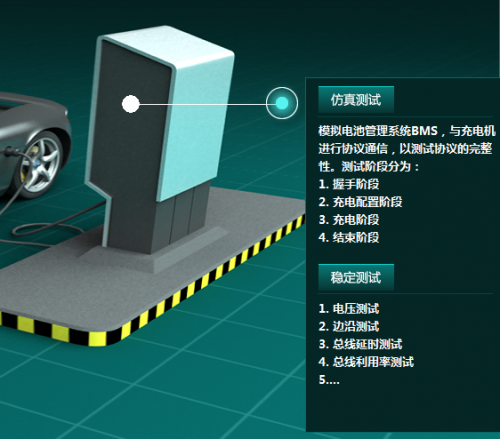
圖7 模擬BMS對充電機仿真測試
在這個模式下,用戶需要先填入需要模擬仿真的BMS系統的參數,比如目標地址、源地址、電池類型、整車動力電池額定容量、額定電壓、單體電池最高充電電壓、最高允許充電電流、標稱總能量、最高允許充電總電壓、最高允許充電溫度、電壓需求、電流需求、充電模式等。然后勾選要仿真的充電過程,點擊開始即可開始測試。如圖8所示。
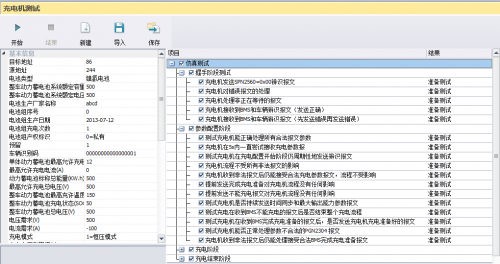
圖8 模擬BMS對充電機仿真測試細節
本測試是按國標中的通信協議進行分支探測,檢驗被測充電機的程序是否充分考慮到各種異常情況,在各種流程分支(包括異常分支)中是否能作出正確的響應。
比如充電握手階段中,CANScope會發送錯誤的報文,以檢測被測充電機對錯誤的報文處理是否正確,是否會導致充電中斷甚至充電機死機等情況。
(4)物理鏈路層可靠性測試:
在和國網電科院的測試認證過程中,我們發現由于充電過程中伴隨有強電磁場的干擾,對CAN總線通信的物理層有很大的影響,有被測設備因為沒有具備良好的電磁兼容能力,而導致充電中斷的現象。所以本測試認證加入了對物理鏈路層的可靠性測試,如圖9所示。
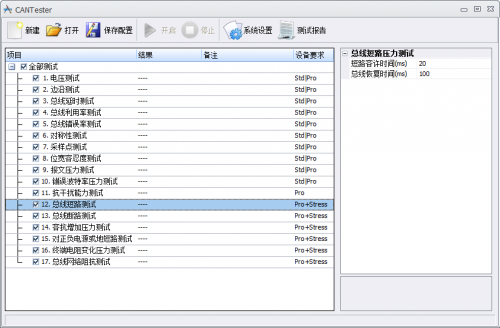
圖9 物理鏈路層可靠性測試細節
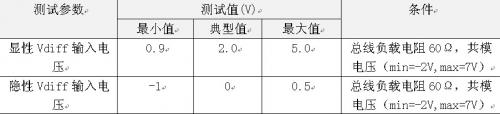
本測試是按照ISO11898-1/2的標準,對CAN通訊的物理鏈路層進行標準化測試,以檢驗被測設備的信號完整性、抗干擾能力等可靠性指標。
比如總線短路測試,CANScope可以模擬短路20ms(可自定義),然后檢測被測設備能否在100ms內恢復,以此驗證被測設備是否有錯誤處理恢復機制。




評論