北斗RNSS/RDSS多模手持終端設計與實現

2 軟件部分
本文引用地址:http://www.104case.com/article/273463.htm2.1 嵌入式系統UCOS介紹
μC/OS-II是一種可移植的,可植入ROM的,可裁剪的,搶占式的,實時多任務操作系統內核。它被廣泛應用于微處理器、微控制器和數字信號處理器。
2.2 硬件初始化介紹
硬件初始化順序為:(1).時鐘初始化。(2).AD初始化 (3).串口初始化 (4).IO口初始化。
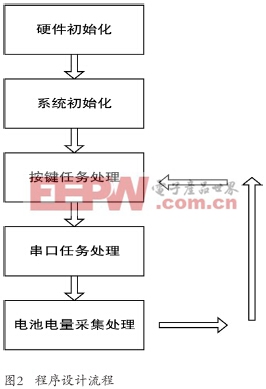
2.3 程序設計流程介紹
系統上電后,先進行硬件初始化,然后操作系統初始化。系統工作分為3個任務,分別為按鍵任務,串口通信任務,電池電量采集任務。如圖2所示。
3 結構部分
本設備包含3個指示燈,放置于設備右側中部,開機按鍵放于右側上部,一鍵報警按鍵放于燈下部,按鍵陷于外殼中,防止按鍵誤碰,設備背部放置拉帶便于攜帶,前部中間放置IC卡,外部加固定擋板。設備上下部放置卡殼,用于GYT2002A終端固定。
4 測試情況與性能指標
4.1 終端測試情況
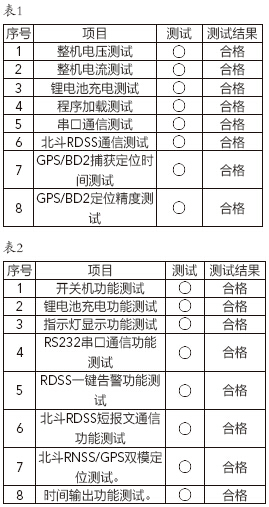
1)板卡測試:
2)整機測試:
4.2 性能指標
接收靈敏度:
誤碼率:≤1×10-5(方位角0°~180°,仰角20°~49°,接收信號電平≤-154.6dBW)
誤碼率:≤1×10-5(方位角0°~180°,仰角50°~90°接收信號電平≤-157.6dBW)
發射信號功率:5W
首次捕獲時間:≤2s
失鎖重捕時間:≤1s
(2)GPS/BD2
捕獲時間:
冷啟動時間(混合定位模式):≤32秒
熱啟動時間:≤1秒
重捕時間:≤1秒
接收通道數:≥99
定位精度:
水平≤10米(RMS)
定位數據輸出頻度:1Hz
時間精度:小于1秒
晶振相關文章:晶振原理








評論