基于S3C2440處理器Linux平臺的物流配送系統設計

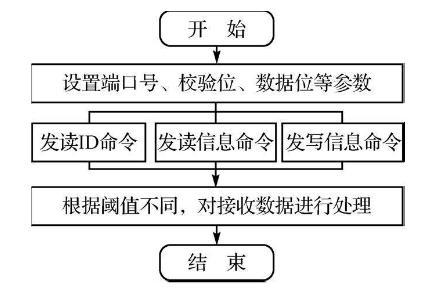
圖5 RFID模塊至移動終端的信息傳輸流程
讀ID代碼:
void CMyDlg::OnBtn_ReadID() {
SendData("Read");
if(0==m_ctrlComm.GetOutBufferCount())
m_ctrlComm.SetRTHreshold(18): //讀取標簽ID所設的閾值
}
讀信息代碼:
void CMyDlg::OnBtn_ReadMessage(){
SendData ("ReadString(18,67)int(8*),int(90,4)");
if(0==m_ctrlComm.GetOutBufferCount())
m_ctrlComm.SetRTHreshold(40): //讀取標簽ID所設的閾值
}
2.4.3 移動終端S3C2440模塊軟件設計
采用模塊化結構設計,根據不同功能分別進行編寫和調試,等到各個模塊都調試成功后,將各個模塊連成整體,組成軟件系統。
移動終端S3C2440模塊完成的主要內容包括兩部分:
① 完成從移動終端到遠程控制中心的定位信息的上行傳輸。當遠程控制中心要從移動終端獲取定位信息時,可以發送命令給S3C2440。這時S3C2440便產 生一個中斷,并發送命令給各定位模塊來獲取定位信息,將定位信息進行處理后再通過GPRS模塊傳給遠程控制中心;或者是移動終端由人員鍵盤控制產生中斷, 然后采集定位信息傳送給遠程控制中心。
② 接收控制中心到移動終端的下行傳輸的信息。控制中心可以將各種數據傳送給終端設備。比如,控制中心通過GIS發現當前移動終端所選道路擁塞,則可以給移動終端發一條改變路線的建議信息,這樣非常方便地實現了遠程控制中心與移動終端的交互。
S3C2440上行至控制中心的軟件設計主要流程如圖6 所示。
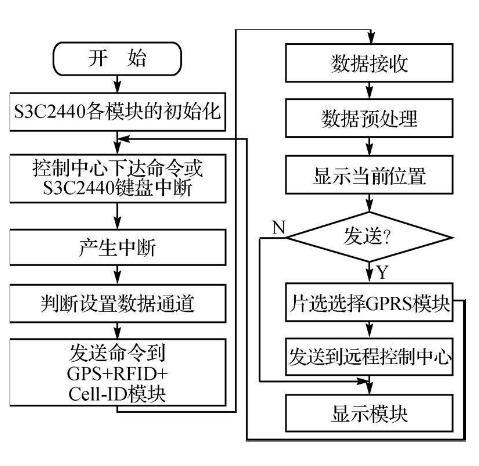
圖6 S3C2440上行至控制中心的軟件流程
結語
本文以GPS定位數據為基礎,GPRS網絡作為承載網絡,結合物流業發展實際需要,將物流配送過程數字化與信息化,實現了對物流配送系統的監控與管理。射頻識別技術、定位技術、傳感器技術以及無線通信技術在未來必將深入到物流業的各個方面。
參考文獻:
[1]. S3C2440 datasheet http://www.dzsc.com/datasheet/S3C2440_589562.html.
[2]. GPRS datasheet http://www.dzsc.com/datasheet/GPRS_1594650.html.
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)
linux相關文章:linux教程
藍牙技術相關文章:藍牙技術原理








評論