一種基于壓力傳感觸控技術的智能地板

2.2定位平臺的設置
本文引用地址:http://www.104case.com/article/271097.htm定位平臺由16個傳感器和4塊玻璃板組成,總面積為70×70 cm2,分為4個單元。傳感器采用輪輻式壓力傳感器(型號為BK-4)。傳感器自身集成有電橋,對外有4條引線,分別為電源Vbg、GND、信號+和信號-.由于傳感器輸出的信號微弱(μV~mV級),因此需要對信號進行放大。本系統采用的放大器為AD623.
為確保定位的準確,定位平臺需要調平。當定位平臺不平時,即當傳感器高度不一致,在圖1所示的四支點定位模型中可能會有1或2個支點處于不受力的懸空狀態,即“虛腿”現象。“虛腿”現象將改變四支點平臺力的分布,從而不能應用四支點公式求重心位置。周祖濂通過數學模型證明了在四支點結構中的四個支點能夠同時受力,即“虛腿”現象可以通過調平來避免。
四支點平臺的簡單調平通常采用向最高支撐靠攏的方法,即通過墊片調節4個支點中高度較低的3個,使其與最高支點高度一致從而調平臺面。本系統通過在傳感器下墊紙片的方法調平定位平臺。
3系統軟件設計
本系統上位機開發平臺采用NI公司推出的LabVIEW 2013.設計的軟件界面如圖3所示。
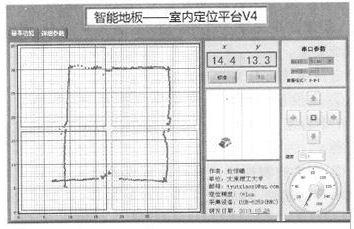
圖3軟件界面
3.1定位顯示模塊
定位顯示模塊的輸入為16個壓力傳感器的數據,經過濾波和計算,輸出為定位平臺上物體重心的位置。位置顯示方式包括文本坐標和二維圖片,路徑顯示方式為XY圖。定位顯示流程如圖4所示。
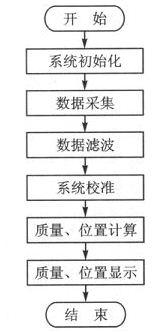
圖4定位顯示流程
3.2運動控制模塊
運動控制模塊是通過在PC機和小車間建立藍牙通信實現的。不具備藍牙功能的PC機可通過藍牙適配器和BlueSoleil軟件實現藍牙功能,小車端通過UART接口連接一藍牙透傳模塊,此時,PC機端和小車端建立了虛擬串口連接,LabVIEW端通過VISA串口通信編程實現向小車發送運動指令。本模塊可完成對小車的速度控制以及前進、后退、左轉、右轉、停止5種運動狀態控制。
3.3遠程監視模塊
遠程監視模塊中,PC機為位置管理服務器,Android終端為客戶機,網絡架構采用分布式Publisher-Subscriber模式,PC機為所有注冊的Android終端提供位置查詢服務。

傳感器相關文章:傳感器工作原理
風速傳感器相關文章:風速傳感器原理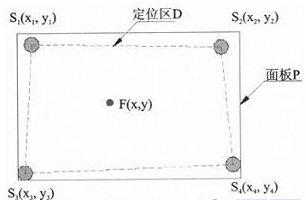
評論