基于LabWindows/CVI的舵機負載模擬系統設計

從控制軟件的流程圖可以看出,在上位機軟件運行過程中采用了多線程技術。這種設計可以更加有效的利用CPU的性能。由于多線程間方便的通訊機制,幾個線程可以共享數據空間,大大減少了啟動線程所需的空間和線程間彼此切換的時間,使應用更加快捷與方便。同時,多線程技術的采用,也使得程序的邏輯與控制方式更加簡單,便于理解與修改。在測控軟件設計與應用過程中,對數據采集的實時性要求很高,這需要系統有較高的采樣頻率,使用高精度的定時器是滿足系統需求的關鍵。在本文的舵機負載模擬系統中,使用了多媒體定時器對控制進程進行管理,其精度很高,最小誤差約為1 ms,且多媒體定時器的優先級較高,可以減輕資源緊張時對定時器運行的影響。
本文引用地址:http://www.104case.com/article/270763.htm3系統控制策略
在舵機負載模擬系統的控制過程中,最大的難點在于對系統運行時產生的多余力進行抑制與消減。
多余力是由承載系統(舵機)的主動運動造成的。承載系統的主動運動,會拖動加載系統(負載模擬器)與其一起運動,在加載作動筒兩腔產生強迫流量,引起多余力。多余力的大小與運動的速度和加速度密切相關。同時,多余力具有微分特性,不僅超前于加載力,并且會隨著承載系統運動頻率的增加而迅速增大。為此,在控制系統設計時,必須采用合理方法,將多余力抑制并消減到一定的范圍內。
為了對負載模擬過程中出現的多余力進行抑制,很多學者做出了研究。楊剛等采用模糊自適應控制策略,能較好的消除多余力,但模糊控制器的建立過程太復雜且可移植性差,石旭東等采用CMAC與PID并行控制方法,自適應能力較強,但神經網絡學習過程具有較大的不確定性。羅璟等引入H∞控制方法,但這種方法需要建立系統的精確數學模型。
結合工程實際情況,分析項目中舵機負載模擬系統的特點,在對舵機負載模擬系統進行控制時,系統的運動譜(舵機運動規律)和載荷譜(負載模擬器運動規律)都是已知的。所以可以根據結構不變性原理,在計算要輸出的控制信號時,預先施加一個適當的前饋補償,以達到減少外部擾動的目的。
舵機負載模擬系統如圖4所示,其中d為干擾輸入。根據結構不變性原理,為了消除干擾d對系統的影響,理論上需要滿足條件Gf(s)G1(s)+G3(s)=0,即需設計一個前饋補償環節Gf(s)=-G3(s)/G1(s)。

圖4 前饋補償原理
在設計前饋補償環節時,以加載輸出端的位移做為前饋補償環節的輸入信號。這樣選擇有兩個突出優點。一是采用加載輸出端的位移做補償輸入時,消除了連接機構的彈性形變以及慣性負載引起的滯后與衰減作用的影響,簡化了負載模擬系統的動態特性,使補償后的系統被簡化成一個二階環節,有助于提高負載模擬系統的閉環動態性能。二是當采用加載輸出端位移為補償輸出時,負載模擬系統控制器中的所有傳感器檢測信號與執行機構控制信號均在加載系統一側,在結構上保持了負載模擬系統的獨立性。
4系統實現與試驗結果
根據上述各部分的分析與設計,完成了舵機負載模擬系統的硬件平臺搭建和軟件程序的編寫與調試。經過一定的調試,達到了理想的控制效果。試驗設備在相應載荷指令下的響應如圖5所示。根據試驗結果可知,實際響應對指令的動態跟蹤效果很好,滿足了系統的要求。
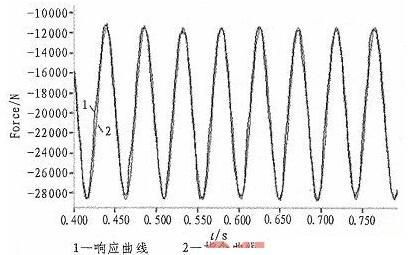
圖5 實驗結果圖
5結論
本文基于LabWindows/CVI開發環境,對舵機負載模擬系統進行分析與設計。經實踐證明,該系統能對舵機載荷進行實時、準確的模擬,具有很好的控制效果,充分滿足了試驗要求。同時,本文提及的舵機負載模擬系統設計方法,對同類的電液負載模擬器的設計也具有一定的借鑒與參考價值。

模擬信號相關文章:什么是模擬信號
電子負載相關文章:電子負載原理


評論