基于ATmega162的指紋識別電子機械鎖設計

2 指紋識別算法原理
本文引用地址:http://www.104case.com/article/269934.htm2.1 指紋識別算法
指紋識別分為以下4個步驟如圖4所示。
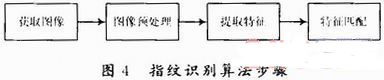
指紋圖像預處理是最重要的一步,關系到后面提取的特征點的正確與否。
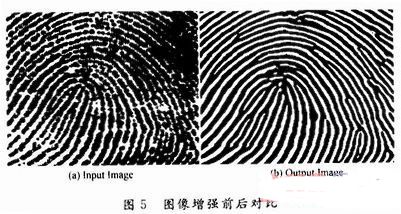
由于指紋采集設備的不完善性,對于干、濕、臟、老化、磨損的指紋,往往難以采集到清晰的圖像,因此需要圖像增強,是指紋圖像預處理中重要的一步,采用Gabor濾波完成。根據指紋圖像局部區域的紋線分布具有較穩定的方向和頻率,設計相應的Gabor帶通濾波器,能有效地在局部區域對指紋進行修正和濾噪。Gabor函數是惟一能達到時頻測不準關系下界的函數,二維表達式為:

Gabor函數是二維高斯函數在空間頻率域的平移函數,σx,σy為對應于x方向和y方向的角頻率平移參數。二維Gabor函數的實部和虛部可各自表示為一個函數,分別稱為偶Gahor和奇Gabor函數。偶Gahor函數適于增強目標物體,而奇Gabor函數適于增強物體邊緣。
Gabor濾波器系數分量為:

式中:x=mcosφ+nsinφ;y=-msinφ+ncosφ;(i,j)為當前點的坐標,φ為當前點(塊)的方向,f為當前塊(整體)的正弦平面波的頻率;(m,n)取值范圍與指紋圖像的坐標(i,j)取值范圍相同。σx,σy增大,對噪聲的適應能力增強,但有可能會產生偽紋線;減小,消除噪聲的作用減弱。
對于每一點,根據其方向、頻率,求出Gabor濾波器系數,然后根據式(3)計算當前點濾波后的值:
從圖5可很明顯地看出,經過Gabor濾波處理后,圖像對比增強,紋理清晰,特征明顯,提高了后續提取指紋特征點的正確率。
2.2 指紋識別模塊的通信協議
指紋識別模塊作為從設備,通過串口,由主芯片ATmega162發送相關命令對其進行控制。
命令接口:19200b/s 1起始位1停止位(無校驗位)。
主芯片發送的命令及指紋模塊的應答數據長度為8 B,數據格式如下:
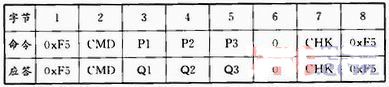
CMD:命令/應答類型;P1.P2,P3:命令參數;Q1,Q2,Q3:應答參數;CHK:校驗和,為第2字節到第6字節的異或值;Q3用于返回操作的有效性信息,表示操作是否成功,數據是否存在,采集指紋超時等。
3 程序設計
系統從睡眠狀態啟動時,首先進行系統初始化,然后進入正常工作狀態,如圖6所示。

轉動機械鎖上的金屬轉接口會改變單片機ATmega162的P4.5的狀態。開啟金屬轉接口,單片機ATmega162處理來自機械鎖發送的信息;關閉金屬轉接口,單片機ATmega162處理來自電子鎖上指紋識別模塊或鍵盤的信息。
系統還開啟了兩個中斷:設置中斷和匹配中斷。匹配中斷就是電子鎖和指定的機械鎖進行匹配,只接收來自指定的機械鎖發出的信息;設置中斷就是指紋和密碼的管理。
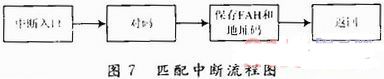
3.1 匹配中斷
匹配中斷是鏈接多特征電子機械鎖兩個部分的前提,初次安裝電子機械鎖必須進行匹配中斷。在開啟該中斷前,必須沒置好正確鑰匙。匹配中斷為外部中斷,通過按下控制系統模塊上的匹配鍵,進入匹配中斷如圖7所示。
3.2 設置中斷
設置中斷分為兩種模式:普通模式和特殊模式。特殊模式就是利用正確鑰匙管理指紋和密碼,如圖8所示。
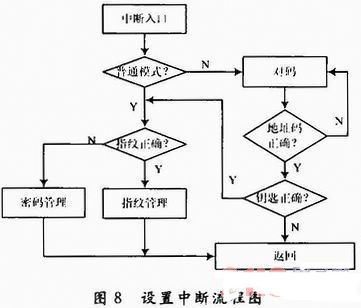
多特征電子機械鎖添加了鑰匙管理指紋和密碼的功能,目前的指紋鎖并不具備該功能。當沒有管理員指紋,而密碼忘記的情況下,該鎖可以用正確鑰匙進行指紋和密碼的添加和刪除,給用戶帶來了方便。
4 實驗結果與分析
超外差發送和接收模塊之間的通信,由于外界噪聲和系統本身的影響,不是每次都能接收到如圖3的信息,可能會出現通信錯誤的情況,為此進行可靠性測試實驗。
用示波器精確測量超外差接收模塊上的波形的時序,調整代碼,使偵測點落在高電平的中間;仔細計算延時函數,確保時間的準確性。在實際調試過程中,進行了5組的實驗,每組的測試條件都不同,如溫度、環境噪聲等,每組測試100次,共計500次的測試,只出現了2次沒有正確識別鑰匙的情況,可靠性達到99.6%,具有實際應用價值。
5 結語
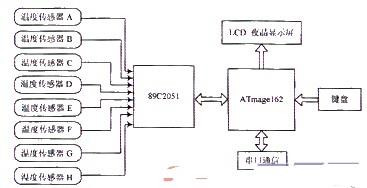
本文設計的電子機械鎖,巧妙利用超外差發送和接收模塊,把兩個相對獨立的部分鏈接起來。整個系統以單片機ATmega162為核心,直接控制指紋識別模塊和鍵盤,并通過超外差發送和接收模塊,間接控制機械鎖部分。多特征電子機械鎖不僅可以用管理員指紋和密碼管理用戶信息,還可以使用正確鑰匙管理用戶信息,目前市場上還沒有具備該功能的鎖出現。該鎖功能強大,給用戶帶來了方便和快捷的同時,安全性也得到大大提高。


評論