基于ATmega16的CAN總線轉RS232設計

3.3 CAN控制器電路設計
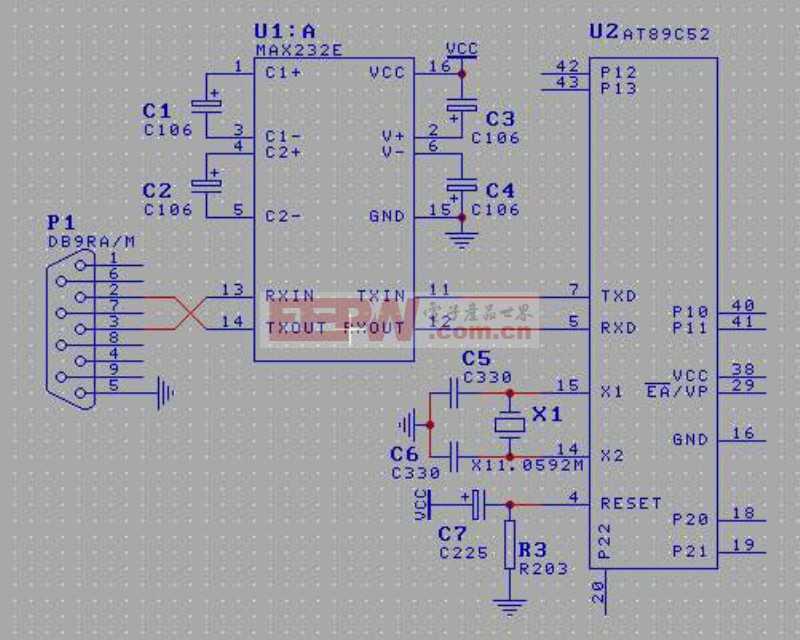
本文引用地址:http://www.104case.com/article/269737.htm選用Phi l ip公司的SJAl000芯片實現CAN控制器和CAN總線驅動器。SJAl000控制器與單片機硬件連接電路設計,如圖2、3所示。

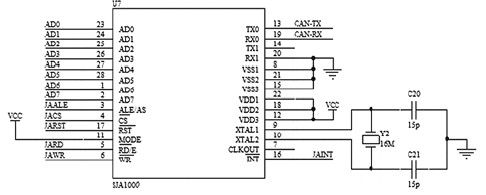
為使SJAl000正確復位,CAN控制器必須連接一個穩定的振蕩器時鐘,這里選擇16MHz的晶振。
3.4收發器電路設計
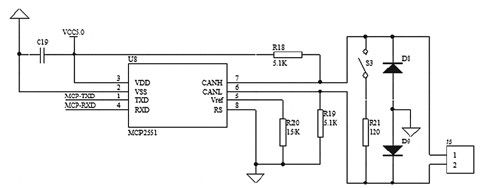
收發器是協議控制器和物理傳輸線路之間的接口,這里由MCP2551實現。協議控制器通過串行數據輸出線(Tx)和串行數據輸入線(RX)連接到收發器,收發器通過有差動發送和接收功能的兩個總線終端CANH和CANI。連接到總線電纜,實現CAN總線的數據通信。如圖4所示。
四、主程序設計
在微處理控制下,RS-232和CAN進行數據交換時,采用CAN查詢方式和串口發送可提高工作效率。其主程序流程圖如圖5所示。SJA1000的初始化在復位模式下才可以進行,主要包括工作方式的設置、時鐘分頻和驗收濾波寄存器的設置、波特率參數的設置以及中斷允許寄存器的設置等。數據能否準確傳遞還取決于波特率和流量控制,這也是軟件設計時不可忽略的地方。
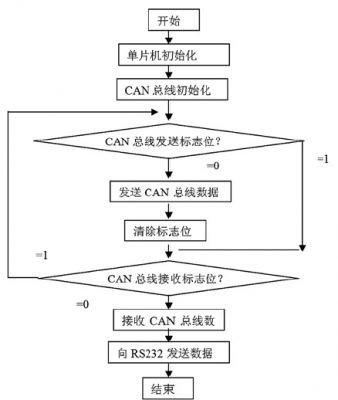
串口波特率采用9600 bit/s,系統上電初始化后CAN控制器查詢發送標志位,一旦發送緩沖區空就發送數據。同時也檢測狀態寄存器的接收標志位,當有數據接收時讀取接收緩沖區,然后判斷接收數據幀,當接收幀為錯誤幀就丟掉數據并將CAN控制器復位,如果數據幀是正確幀就將該幀打包成符合RS232協議的幀結構,通過串口發送出去。
五、結束語
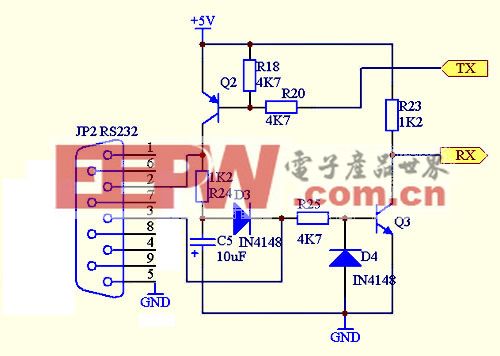
本文采用ATMega16、SJAl000、MCP2551和MAX232,設計開發了CAN總線轉232的接口,完成了兩種協議的轉換,實現了CAN總線與RS232通信接口設備之間的通信。測試和實際使用表明該接口運行穩定、可靠,達到了設計要求。
晶振相關文章:晶振原理







評論