基于PSoC?4 的PMSM無傳感器矢量控制

摘要:本文介紹了基于Cypress PSoC®4平臺的PMSM無傳感器FOC解決方案。方案采用改進滑模控制器進行位置估算,可有效消除抖振現象;PSoC®4內部集成兩個支持比較器模式及SAR ADC輸入緩沖功能的運算放大器,無需外部運放即可完成電流采樣;四個可支持中央對齊PWM及同步ADC操作TCPWM模塊,可靈活完成三相電機的控制。
本文引用地址:http://www.104case.com/article/263243.htm關鍵字:PSoC®4,矢量控制,無傳感器, 滑模觀測器
Abstract: This paper introduces the sensorless FOC solution based on Cypress new product PSoC®4. PSoC4 owns rich on-chip resources which can realize high integrated design. With two internal opamplifiers, PSoC4 can implement two phase currents sensing without external chips; Four TCPWMs which support center-aligned PWM and programmable dead zone can flexibly control three-phase inverter.
Keywords: PSoC®4,FOC,Sensorless, Slide Mode Observer, Motor control
1. 引言
永磁同步電動機(PMSM)因其體積小、重量輕、功率密度高等優點而廣泛應用于航空、航天、工業等領域。在PMSM驅動系統中, 無位置傳感器空間矢量控制技術是一種成本低、可靠性好、維護簡單的控制策略,避免了安裝傳感器(如旋轉變壓器、編碼盤等)帶來的系統體積重量增大、維護難等問題,并可適用于一些特殊場合,如空調壓縮機等。PMSM無位置傳感器空間矢量控制技術的難點在于轉子位置的估算,近年來許多學者對此進行了深入的研究,提出了很多方法,如反電動勢過零檢測、高頻注入法、卡爾曼濾波、模型參考自適應法、各種觀測器法等。在這些方法中,滑模觀測器由于其魯棒性強、對系統參數變化及外界擾動不敏感、易于工程實現等優點,在交流調速系統中得到了廣泛的應用。本文將討論基于滑模觀測器的無傳感器矢量控制技術。
2. PMSM無傳感器矢量控制原理
狀態觀測器的實質就是重構控制系統的狀態,將原系統中可以直接測量的變量作為新構造系統的輸入信號,并使構造新系統的輸出信號在一定條件下等于原系統的狀態。滑模變結構控制就是根據系統當前的狀態的不同,反饋控制器的結構按照事先規定的控制法則有目的地、不斷地變化。通過控制系統結構的不斷變化,最終使得系統的結構以極高的頻率來回切換,系統的狀態點做高頻的上下穿越運動即滑模運行。由于變結構控制的這種獨特的不連續的控制特點,它對被控對象的數學模型的精確程度要求不高,尤其是在控制過程中被控對象參數的變化和外部干擾,這些都不會對變結構控制的控制精度產生較大的影響,即變結構控制對外界的干擾有很強的魯棒性。
變結構控制的基本原理是:在變結構控制中,控制量根據設定的控制法則在u+(x) 或u−(x) 之間切換. 變結構控制就是根據系統當前的狀態的不同,反饋控制器的結構按照事先規定的控制法則有目的地、不斷地變化,最終使得系統的結構以極高的頻率不停地來回切換,系統的運動點則以極小的幅度和極高的頻率在S(x)=0 上下穿越。這種特殊的狀態叫做“滑模狀態”。此時,這種變結構控制就叫滑模變結構控制。此時,稱S(x)=0 被稱作滑模面,S=S(x) 為切換函數。
滑模觀測器設計
等式2減去等式1可得:
無傳感器矢量控制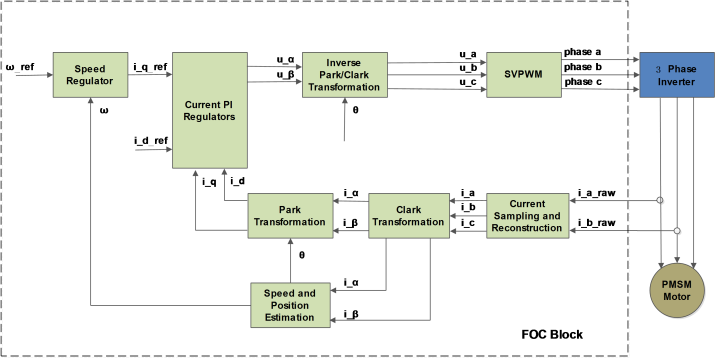
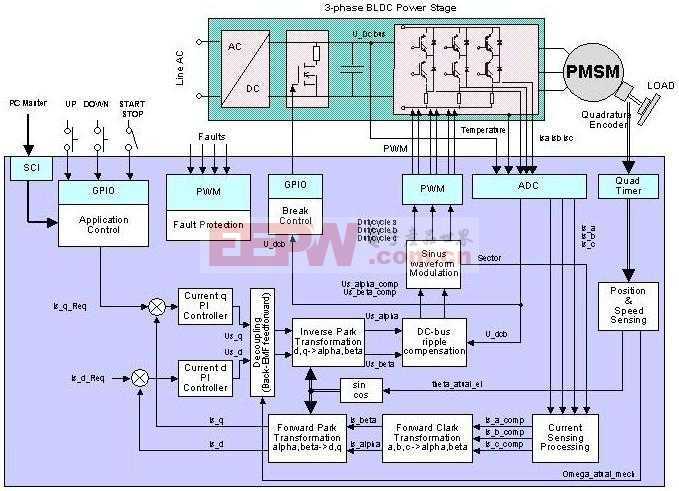
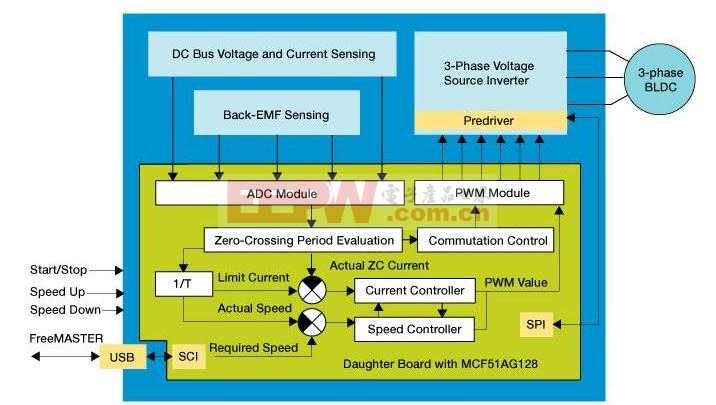
圖1 無傳感器FOC控制框圖
圖1為無傳感器FOC控制框圖。整個FOC控制的核心是坐標變換,通過坐標變換將采樣所得的三相電流轉換成轉矩電流分量i_q和磁通電流分量i_d。通過PI控制器分別對i_q和i_d進行控制,并將i_d的參考值設置為0實現最大轉矩控制。三相電流采樣重構后經過滑模觀測器,一方面獲得轉子位置角,用于坐標變換,另一方面可利用角度信息獲取速度信息,用于速度控制。最后通過FOC SVPWM法對三相逆變器進行控制,實現逆變驅動PMSM運行。

比較器相關文章:比較器工作原理
傳感器相關文章:傳感器工作原理
風速傳感器相關文章:風速傳感器原理 矢量控制相關文章:矢量控制原理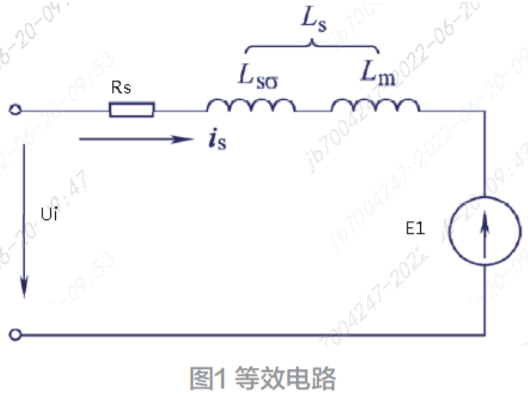








評論