一種基于CAN總線的電動車控制系統設計方案

4 CAN總線節點的軟件設計
本文引用地址:http://www.104case.com/article/262818.htm系統采用基于C語言的程序設計。在IAB開發環境下進行調試和仿真。整車控制節點的軟件設計主要包括4個部分:CAN控制器的初始化、報文發送、報文接收和錯誤處理。
4.1 CAN控制器的初始化
在啟動CAN通信前必需進行CAN模塊的初始化,包括硬件使能、CAN工作模式設置、總線波特率設置、設置中斷、驗收過濾器設置等。初始化操作在CAN模塊復位的模式下進行。初始化程序流程圖如圖4所示。
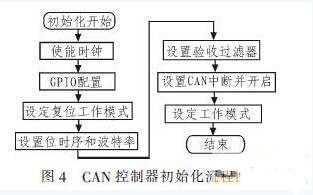
本設計中采用的是29位擴展標示符,符合CAN2.0B的標準,所以在驗收屏蔽過濾器設置中進行相應的設定。同時,本設計的CAN波特率設置為250 Kb/s,與總線上其他節點的波特率相同,才能進行正常的通信。
4.2 數據的發送
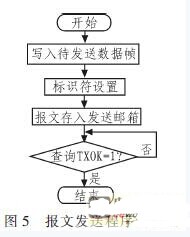
對CAN數據的發送采用查詢方式,提高處理器的效率,STM32F103VE的CAN模塊有3個發送郵箱,發送報文的流程為:應用程序選擇一個空發送郵箱;設置標識符,數據長度和待發送數據;對CAN+TixR寄存器的TXRQ位置1,請求發送;一旦CAN總線進入空閑狀態,發送郵箱中的報文則立即發送,成功發送后,郵箱為空;通過查詢CAN_TSR寄存器的TXOK位來查詢報文是否發送成功。數據發送程序的流程圖如圖5所示。
4.3 數據的接收
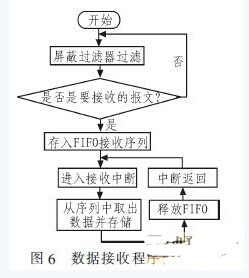
對CAN報文的接收采用中斷方式,提高通信的實時性。接收報文的流程如圖6所示。當CAN總線發來一個報文,根據屏蔽過濾器設置的標識符進行過濾,如果是要接收的報文,則CAN控制器將總線上的報文按順序存入接收FIFO,并進入接收中斷,在中斷中對接收FIFO中的報文進行存儲,然后釋放 FIFO郵箱。如果不釋放郵箱,當總線上再發送過來報文時,會直接覆蓋上一個報文,從而導致報文丟失。數據接收程序流程如圖6所示。
4.4 錯誤處理
電動車的整車控制器需要接收BMS、CCS和電機控制器這3個節點發來的報文,如果超過1 s未接收到例如BMS的報文,則通信鏈路超時,此時需要進行故障處理。所以在軟件設計時,定義一個全局變量,在每個定時周期中加1,在接收BMS報文中斷中,對此變量清零,則可以實現通信超時檢測。當總線發生嚴重故障時,CAN節點錯誤寄存器累積到一定次數時,CAN控制器會關閉總線,節點脫離總線。
5 結論
在實車實驗中,各個節點可以實現可靠的數據通信,可以實現電動車的加減速和勻速運行。在本電動車控制系統中,設計的CAN通信節點體積小、功耗低、處理能力強、抗干擾性好,能在電磁環境復雜的環境中穩定、可靠地工作。在電動車控制系統中可實現數據的實時快速通信,可靠性

光耦相關文章:光耦原理
晶振相關文章:晶振原理 雙控開關相關文章:雙控開關原理








評論