超高頻RFID定位的相位式測距方法研究

由式(4)、式(5)可知,射頻載波信號經副載波調制后會產生一個差頻項和一個和頻項,它們的相位值分別對應載波相位與副載波相位的差與和,則副載波信號經標簽反向散射返回后的相位差為

將式(6)帶入式(1),即可得到閱讀器與標簽之間的距離信息。
3 定位仿真分析
使用Matlab軟件進行仿真,參數設置如下:
①信號參數,采樣頻率fs=9.128 MHz,副載波頻率f0=2 MHz,載波頻率fc=915 MHz,調制電平A=1。
②環境參數,在20 m×20 m二維空間的四個角上布置4個閱讀器,標簽位置隨機投放。
③噪聲,實際定位中噪聲不可忽略,定義疊加噪聲幅度分別在SNR=5 dB、8 dB、11dB、14 dB、17 dB下仿真。
進行1000次蒙特卡洛仿真實驗,定義均方根誤差(RMSE)n為測量次數,di為測量值與真實值的偏差。
把用比值法、能量重心法得到的測量值進行比較,如圖4所示,在小信噪比環境下,比值法稍優于能量重心法,隨著信噪比的增大,兩種方法的測相誤差和測距誤差都 隨之減小,在SNR>11 dB后,兩種算法的誤差基本相同。在各信噪比下,測相誤差最大達到6.27°,最小僅為1.43°,測距誤差的范圍為0.30~1.31 m。
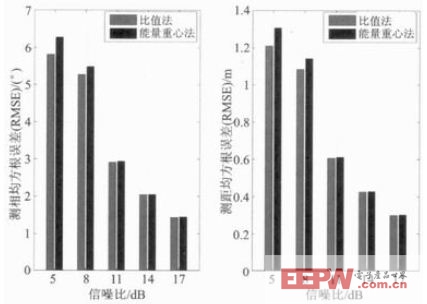
圖4 測相,測距誤差對比
圖 5為采用最小二乘法進行定位后兩種算法的RMSE對比圖。從整體趨勢上來看,隨著信噪比的增大,定位誤差不斷減小。在噪聲較小SNR =17 dB時,兩種方法RMSE均在0.35 m左右;在噪聲增大到SNR=5 dB時,比值法RMSE為1.47 m,能量重心法RMSE為1.57 m。在SNR由5 dB增大到8 dB的過程中,兩種方法的RMSE都有明顯的降低,分別降低了0.43 m和0.51 m。
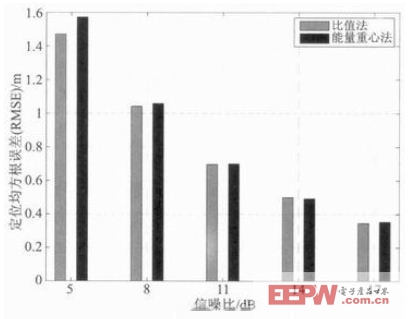
圖5 定位誤差對比







評論