無線傳感器網絡的WiME系統路由設計及應用

隨著微機電技術、低功耗嵌入式技術和通信技術的飛速發展,具有感知能力、計算能力和無線通信能力的微型傳感器得到了廣泛的應用。這些由無線微型傳感器組成的傳感器網絡能夠協作地實時監測、感知和采集網絡分布區域內的各種環境或檢測對象的信息,并對這些信息進行處理,傳送到需要這些信息的用戶。這便是被美國商業周刊認定的21世紀最具影響力的21項技術之一——無線傳感器網絡(Wireless Sensor Network,WSN)。
本文引用地址:http://www.104case.com/article/259257.htm在一個20層樓高、有著上千個房間的龐大醫院中,一位剛進入大樓的坐在智能車中的老年人或殘障病人,如何可以輕松地到達自己要去的房間?我們正在嘗試為這樣的需求提供一種不需要外界干預的“室內自動導航系統”——稱為“無線復眼系統(Wireless Mosaic Eyes,WiME)”。概括地講,它是一個基于生物行為啟發的無線傳感器網絡,通過空中大量分布的無線節點對智能車提供行為控制,因此是一個采用無線傳感器網絡實現的機器人導航系統。
WiME涉及兩個路由問題:一個是在地理空間的機器人路徑規劃,另一個是在分散的通信節點之間的信息通信路由。復眼可以作為機器人導航過程中的電子燈塔;無線復眼網絡可以被認為是描述地理空間的一個拓撲圖、地理路徑規劃,也可以被簡化為一個網絡拓撲圖中的路徑規劃。因此在WiME中,空間路徑規劃和信息通信路由可以以完全相同的方式工作,而路徑規劃將根據各分散節點的語義定義為基礎。
為了在WiME這樣一個采用無線傳感器網絡技術的系統的節點上實現完整地圖的機器人導航,本設計使用一種單步方向查詢的路徑存儲和查詢系統。為了進一步減小資源有限的無線傳感器節點中的路徑信息的數據量,在WiME的設計中對每一個分組使用Bloom Filter來壓縮存儲。另外,由于路徑信息可能是動態建立的,為了滿足頻繁修改的要求,將每個子表設計為計數型Bloom Filter。
2 WiME系統
2.1 WiME的生物啟發
自主機器人通常都配備有傳感器,能夠感知環境并自主移動,其配備的傳感器可以認為是機器人的器官,它們所感知到的信息由機載電腦集中處理。這種集中構架面臨如下三大問題:傳感器處理過程在真實環境中不魯棒;在動態環境中,處理算法的計算量大;在非結構化的環境中理解場景十分困難。
然而,與脊椎動物的眼睛相比,更低級的昆蟲的眼睛是極具創造性和多樣性的。生物學研究發現,一些昆蟲可以用很小的神經系統來處理上萬只小眼的信息。狼蛛復眼中的單眼功能不盡相同,一些用以提供前向視覺,而其他的則用來探測和提供周邊的視覺信息,這些視覺信號傳遞到大腦后可以融合并完成移動檢測、距離估計、運動控制等。因此,通過分布式功能劃分和適當的傳感器路由,復眼的信息處理機制的效率可以很高。
受此啟發,建立WiME這樣一個基于無線復眼網絡的智能環境。其中,各單眼將由低分辨率的視覺傳感器節點構成,通過IEEE 802.15.4協議通信并組織形成環境神經系統;通過探索仿生技術和算法,以支持無線復眼系統的智能信息處理(包括路徑規劃、行為協調、傳感器融合和路由等)以及視覺伺服。在WiME中,每個單眼都提供有明確的語義(定位信息和行為集),而它們的拓撲連接將采用行為網絡來隱式建立;行為將通過能量累積所產生的事件進行激發。節點之間的連接包含了信息融合和路由的條件概率信息;機器人的導航將建立在具有明確語義的傳感器拓撲圖的基礎之上,而不是建立在非結構的地理環境之上。
2.2 WiME的設計目標
(1)基于無線通信的分布式復眼
以無線傳感器網絡為連接機制,將具有高運算量和大數據量特征的局部視覺信息以具有明確語義概念的形式實現通信連接,完成低通信帶寬的視覺協同。
(2)基于語義和信息全息的路由算法
該算法是一個針對用戶詢問的最優路徑搜索算法。路由算法應充分考慮查詢語義,采用信息全息編碼方式壓縮可能查詢和全局路由表,最終實現快速尋優。這也是昆蟲復眼信息流分布的具體體現。
(3)生物啟發的分布式行為協調
由于本研究將眾多運動行為分布在整個復眼系統中,機器人導航控制將面臨如何和諧地組織與激發行為。本研究將由生物神經網絡為啟發,探索脈沖(spike)激勵的動作組織方式,以實現具有目標驅動和及時響應特性的行為控制網絡。
2.3 無線復眼系統中的單視神經元的設計
①基礎運動檢測器(EMD)。以生物視覺所特有的基礎運動檢測器(EMD)為藍圖,將低分辨率并可隨機讀取的CMOS視覺傳感器作為視網膜,與無線模塊連接構成系統單眼。
②低分辨率圖像的語義提取。實時圖像語義提取的內容包括:低分辨率的特征提取,包括顏色、紋理和區域形狀;融合紋理、顏色和形狀特征并給出解釋;區域分割和空間分析。這部分將采用降分辨率技術,通過并行運算與FPGA實現相結合,減少計算代價并把算法應用到分布式視覺融合中。
③對象跟蹤和模式識別。
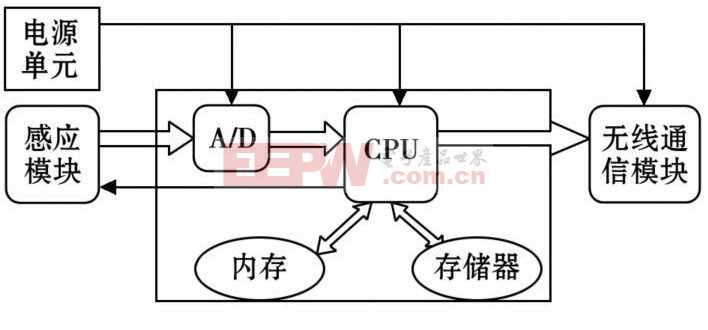
④無線傳感器節點。節點一方面通過外圍電路與EMD相連,另一方面通過IEEE 802.15.4協議的接收器與其他復眼及機器人進行通信,從而提供復眼神經系統的信道;同時,復眼信息的融合與行為序列的產生這樣的運算也要在節點上完成。






評論