基于DSP的新型彈載控制計算機

2 控制系統(tǒng)整體方案設計原則和設計思路
由圖1的接口組成可看出信息數(shù)據(jù)的流向。接口設計是一個重 要的環(huán)節(jié),其設計質量將直接影響系統(tǒng)的性能。為了減輕計算機的負擔,外部的輸入信號 用中斷方式讀入,信號輸入輸出時要考慮抗干擾性。所設計的整體方案要易于實現(xiàn),對不同 型號的導彈要有一定的適應性,對于要求相近的型號,應該以修改控制軟件為主,以少改動或不改動硬件設計為好。這些要求都要在方案設計的各個環(huán)節(jié)中考慮。
3 彈載控制計算機與外圍的接口設計
彈載控制計算機與外圍的單元進行數(shù)據(jù)交換時,慣性器件應以脈沖數(shù)的 方式將信息數(shù) 據(jù)送出,由彈載控制計算機對其計數(shù),轉換為數(shù)據(jù),這樣不但加大了彈載控制計算機的負擔,而且慣性器件對應的模數(shù)轉換和隔離也復雜了。參考美國國軍標和前蘇聯(lián) 的做法,并考慮到新型敏感裝置或慣性器件中都采用了計算機或單片機。為了簡化彈載控制計算機與外圍單元交換數(shù)據(jù)的接口電路、減少隔離措施,可采用RS-485、RS-232或RS-422 通訊協(xié)議。為了減少彈載控制計算機和外圍單元串行通訊的時間開銷,同時也為了減少接口器件的數(shù)目、提高整體系統(tǒng)的可靠性,選用UART通訊接口芯片,可實現(xiàn)異步串行通 訊、數(shù)據(jù)采用中斷方式讀入控制計算機。由于DSP的I/O資源有限,需要控制大量外部接口線,在擴展I/O時,可直接借用UART控制器(如16C550,16C554)的閑置MODEM管 腳,而省去了擴展I/O帶來的不可靠因素。
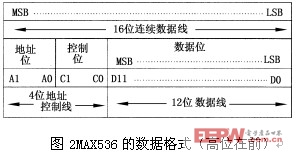
控制伺服機構常用的是4個舵機,飛行中要求這4個舵機同時動作,相互之間不能有延遲。 由于結構上的限制,舵機的控制器離彈載控制計算機有一定的距離,為了抗干擾和提高系統(tǒng)可靠性,仍然需要串行通訊。為了保證控制精度,舵機的伺服控制器一般采用12位或更高的 D/A得到控制指令。如果考慮到通訊的數(shù)據(jù)量、舵機的工作方式和控制的實時性要求,在滿足精度的前提下,選用12位的D/A變換比較合適,如選用MAX536,其通訊的數(shù)據(jù)格式見圖2 。
由圖2可知,在1個字的通訊數(shù)據(jù)中,除了12位的D/A數(shù)據(jù)外,還可以用高4位地址/命 令位的 不同組合來實現(xiàn)“逐個送數(shù),同時輸出”,達到同時控制4個舵機的目的。這樣的選擇可以實現(xiàn)和C31的無邏輯連接。
4 DSP的選擇
DSP的選擇要從控制性能要求、接口、計算速度、計算精度、軟件的編 制和軟件的移植性等方面考慮。參考圖1,由于通訊接口采用了UART控制器,使得原本比較費時的通訊耗時很少,幾乎可以不考慮,這樣DSP計算速度的選擇就由控制方案中控制方程計算量的大 小來定,對于擺動頻率不超過10 Hz的小型導彈,采用2 ms控制周期,選用50 MHz晶振的DSP 即 可滿足需求。考慮到編程的方便和程序的移植性,選用浮點的DSP比較合適,再加上 對所需硬件資源,又選擇了TMS320C31-50及選擇微計算機工作模式,其主要硬件資源列于表 1,功能模塊如圖3所示。對于升級,可以考慮選用TMS320C4X 或TMS320C6X系列。


數(shù)據(jù)/程序總線 STRB: 32位數(shù)據(jù),24位地址
內部RAM 2K字, RAM0 1K; RAM1 1K
串行I/O口 1個高速串行口
DMA控制器 單通道
定時器 兩個,32位
外部中斷源 4個:INT0~INT3
仿真器接口 1個
互鎖信號 兩個:XF0,XF1
其他 保持、復位等信號
5 控制邏輯的設計
為了進行與外部數(shù)據(jù)的交換,需要片選、數(shù)據(jù)線、地址線等時 序信號按照規(guī)定的邏輯關系工 作,即系統(tǒng)要在邏輯控制關系的協(xié)調下,才能形成工作時序,系統(tǒng)才能正常工作。這種邏輯控制關系一般可用門電路或邏輯宏單元實現(xiàn)。為了實現(xiàn)4.2中的通用性,同時也是為了減少 硬件的數(shù)目,提高系統(tǒng)的可靠性,選用了邏輯宏單元。通過對系統(tǒng)所需的邏輯控制信號數(shù)目的分析,調試硬件時更改邏輯控制信號,選用了Lattice公司的在線邏輯編 程單元isp1610E。按照邏輯關系,編寫出邏輯控制方程,用專用電纜download后,即可實現(xiàn)邏輯控制。調試過程可參考硬件調試流程圖。









評論