基于μc os ii的農田信息采集系統設計

0 引言
精細農業的核心問題可敘述為信息獲取、農田信息管理和分析、決策分析、決策的農田實施四大部分。其中農田基礎信息(土壤養分、濕度、理化性狀、苗情、病蟲草害)的獲取和處理是精細農業技術的起點。如果這個問題解決不好就很難真正地實施精準農業。農田信息主要包括地理環境、土壤環境、小氣候、水環境、與作物生長狀況相關的信息以及管理信息等,具有量大、多維(信息多種多樣)、動態、不確定(系統的噪聲或隨機噪聲)、不完整、時空變異性強等特點。在精細農業研究中,目前優先需要考慮的是土壤水分、土壤養分、土壤壓實、耕作層深度和作物病蟲草害及作物苗情分布信息等,要求能夠定位、快速、精確、連續地測量。傳統的實驗室分析方法已很難滿足這一要求,為此,需要開發適用于精細農業的農田信息快速采集技術。本設計以S3CA4B0X為主體,構建農田信息采集系統的硬件平臺,并在S3CA4B0X內部嵌入μC/OS-Ⅱ實時操作系統,可大大提高系統的穩定性和實時響應能力,增強系統的可靠性、可擴展性、可移植性。
1 μC/OS-Ⅱ簡介
嵌入式實時操作系統μC/OS-Ⅱ的全名是Micro-Controller Operating System Version2,是基于優先級的搶占式實時多任務操作系統,包含了實時內核、任務管理、時間管理、任務間通信同步(信號量,郵箱,消息隊列)和內存管理等功能。
μC/OS-Ⅱ采用微內核設計,使用C語言編寫,追求編程的靈活性,可配置、可裁剪、可擴充、可移植。μC/OS-Ⅱ是基于優先級的可剝奪型實時多任務內核,優先級算法采用查表法,切換速度快。μC/OS-Ⅱ可以處理和調度多達64個任務,目前有8個留給系統使用,應用程序可使用多達56個任務。
2 硬件系統設計
2.1 農田信息采集系統結構
系統主要由通訊模塊、農田數據采集模塊、數據處理及存儲模塊幾部分組成。主要完成以下幾個方面功能:
(1)在農田信息采樣時,通訊模塊接收全球定位系統GPS經緯度位置信息,數據采集模塊完成田間土壤參數信息的采集,系統的多個模擬信號輸入通道與田間土壤水分、溫度、養分等傳感器探針相連,測量田間土壤的水分、養分、溫度等參數值,然后與上位計算機相連,進行處理。
(2)在工作室進行農田數據處理時,通訊模塊將采集的農田數據傳給計算機,計算機上的軟件進行一系列處理,最終生成田間土壤水分分布圖、養分分布圖和溫度變化圖等并保存。
(3)農田信息采集系統擴展CAN總線數據收發接口后,可與農機機械的(拖拉機、收割機等)CAN控制總線相連接,幫助駕駛員駕駛農業機械在田間實施農業操作。在需要進行自動變量施肥、變量噴灑農藥等農業作業中,要求農機機械在特定的農田中采取特定的行進速度,以達到噴撒物的劑量與農田作業的要求相適應。并依據農業信息采集系統和專家系統提供的農機機械作業路線,使駕駛員操作農機機械按照電子地圖上設計的行走路線行走,從而完成播種、施肥、滅蟲、灌溉、收割等工作,包括完成耕地深度、施肥量、灌溉量的控制任務等。
2.2 農田信息采集系統的硬件方案
本系統以嵌入式微處理器ARM S3C44B0X芯片為核心,包括傳感器信息采集電路、串口通訊電路、GPS通訊電路、擴展的CAN總線、數據存儲電路、液晶屏顯示電路、鍵盤接口電路以及功能鍵盤等構成。系統結構如圖1所示。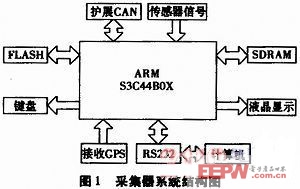
3 農田信息采集系統軟件設計實現
3.1 μC/OS-Ⅱ嵌入式操作系統在S3CA4B0X芯片上的移植
在嵌入式操作系統應用中,每個任務都是相互獨立的,而且會發生頻繁的任務轉換,為了使轉換的任務能夠返回到原來的斷點,所以必須得把與轉換的任務運行環境密切相關的各種寄存器和變量全部保存起來。這就是定義構造一個用戶任務堆棧結構,來保證多任務嵌入式操作系統的正常運行,這種堆棧結構保存了與各個轉換的任務運行環境密切相關的所有寄存器變量,而且所有任務的堆棧結構必須完全一致,這樣才能用統一的任務切換程序在任務之間作頻繁的任務轉換,而且還要求不會破壞各個任務的實時運行環境。因此在建立每一個新任務的同時,必須為該任務分配一定的系統資源,包括一個任務棧、一個任務控制塊,并將與該任務密切相關的各個變量,比如任務優先級別、堆棧大小等變量保存到任務控制塊中,同時還得完全按照任務堆棧初始化結構那樣初始化該任務的任務堆棧,然后將任務堆棧的棧頂指針保存到該任務控制塊的相應位置。
移植工作主要是改寫OS_CPU.H,OS_CPUA.ASM,OS_CPU.C,OS_CFGH,INCLUDES.H,其中與處理器相關的文件為:OS_CPU.H,OS_CP U.C,OS_CPU_.A.ASM。μC/OS-Ⅱ嵌入式操作系統硬件和軟件體系結構如圖2所示。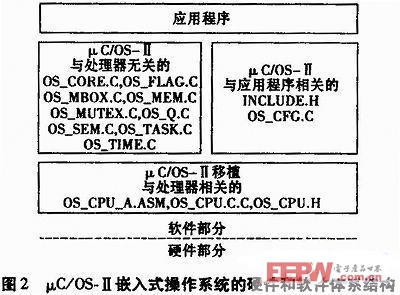
在數據類型定義中,S3C44B0X芯片是32位處理器,但是,μC/OS-Ⅱ嵌入式操作系統所處理的仍然是INT16U。用戶必須將任務堆棧的數據類型告訴給μC/OS-Ⅱ嵌入式操作系統。這個過程是通過為OS_STK聲明正確的C數據類型來完成的。S3C44B0X芯片的堆棧成員是16位的,所以將OS_TsK聲明為無符號整形數據類型,定義如下:
tyPedefunsignedlong OS_STK;
堆棧增長方向OS_STK_GROWTH定義如下:
#defin OS_STK_GROWTH左堆棧增長方向為從上往下增長
#define STACKSIZE256/μC/OS-Ⅱ嵌入式操作系統需要先禁止中斷訪問代碼的臨界區,并且在訪問完畢后重新允許中斷。
與所有的實時內核一樣,μC/OS-Ⅱ嵌入式操作系統需要先禁止中斷再訪問代碼的臨界區,并且在訪問完畢后重新允許中斷。這就使得μC/OS-Ⅱ嵌入式操作系統能夠保護臨界區代碼免受多任務或中斷服務例程的破壞。在S3CA4B0X芯片上是通過兩個函數(OS_ENTER_CRITICAL()和OS_EXIT_RITICAL())實現開關中斷的。
3.2 任務優先級及任務關聯設計
在本項目中,為實現農田信息采集系統的功能要求,在μC/OS-Ⅱ中設計以下任務:時鐘節拍任務、鍵盤任務、顯示任務、數據采集任務(土壤水分、土壤養分、土壤壓實、多點溫度數據采集)、數據處理及存儲任務、串口通訊任務。數據采集任務、數據處理與存儲任務設置為周期性任務。在這些任務中,μC/OS-Ⅱ時鐘節拍服務是通過中斷服務子程序調用時鐘節拍函數來實現的。因而采用定時器1產生中斷,定時周期10ms。除此以外,該函數還要啟動A/D轉換以及每隔一段時間發送消息給相應的任務,從而觸發相應的任務執行等。因此,優先級最高;數據采集任務、串口接收任務和串口發送任務實時性要求比較高。其中,串口接收任務是關鍵任務和緊迫任務,遺漏接收內容是不允許的;數據采集任務是緊迫任務,但不是關鍵任務,遺漏一個數據還不至于發生重大問題;在串行口發送任務中,CPU是主動方,慢一些也可行,只要將數據發出去就可以。顯示任務和鍵盤任務是人機接口任務,實時性要求較低。由于顯示任務要等數據處理及存儲任務所得的數據,故數據處理及存儲任務的優先級可安排得比鍵盤任務和顯示任務高一些。農機設備控制任務的實時性要得到保證,因此要設為較高優先級。
由于系統的實際運行效果是各個任務配合運行的結果,這種配合過程又是通過操作系統的管理來實現的,即通過調用操作系統服務函數來實現的。“何時調用系統服務”和“調用什么系統服務”是任務設計中的關鍵問題,這個問題與任務之間的相互關聯程度有關,需要通過分析這種關聯關系才能確定。為了進行任務設計,必須把這些任務之間的相互關系搞清楚。
根據農田信息采集系統功能需求,設計任務關聯圖如圖3所示。系統應用軟件包含10個任務:傳感器數據采集任務為周期性任務,以一定的時間間隔采集數據,通過消息隊列將所采集數據傳輸給LCD顯示任務,并通過郵箱1#傳遞給數據處理與存儲任務,同時,GPS接收的位置信息通過郵箱2#及時插入采集的數據當中;數據處理與存儲任務以信號量1#將數據通過串口通訊任務傳遞給計算機,并在計算機上生成田間土壤水分分布圖、養分分布圖和溫度變化圖等數據,計算機生成的數據又經串口通訊任務由信號量2#發給擴展CAN總線任務,以此來控制農田機械設備執行相應的程序,完成自動變量施肥、變量噴灑農藥等;鍵盤掃描任務、數據處理與存儲任務等和顯示任務同步,以消息隊列1#通知顯示任務更新顯示。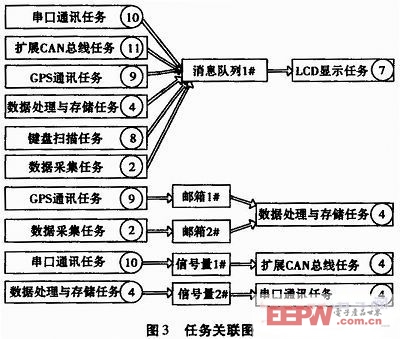
4 結束語
本文以嵌入式微處理器S3CA4B0X芯片為主體,構建農田信息采集系統的軟硬件平臺,分析了μC/OS-Ⅱ操作系統的特點,并在嵌入式微處理器S3C44B0X芯片內嵌入μC/OS-Ⅱ實時操作系統,闡述了基于μC/OS-Ⅱ操作系統的農田信息采集系統的設計與實現方法。由此開發的農田信息采集系統的實時響應速度快,并實現軟件設計模塊化,可大大提高系統的穩定性和實時響應能力,增強系統的可靠性、可擴展性、可移植性,有著廣泛的應用前景。


評論