ARM9和Linux的DS18B20驅動程序研究

本文介紹了Linux設備驅動程序的類型和文件操作接口函數,以及驅動程序的基本開發過程。以ARM9為平臺,基于Linux2.6.30開發DS18B20的驅動程序,以模塊的形式加載到內核,最后通過應用層調用驅動程序,獲得溫度數據。
引言
隨著嵌入式技術的發展,基于ARM和Linux的嵌入式產品越來越多,DS18B20溫度采集傳感器在工業和生活上應用廣泛,研究開發基于ARM9和Linux的DS18B20的驅動程序可以滿足大部分溫度采集平臺的應用。
1 Linux設備驅動的開發過程
Linux操作系統通過各種驅動程序來操作硬件設備,它屏蔽了各種設備,設備驅動程序是操作系統內核和硬件之間的接口。從應用程序來看,硬件只是一個設備文件,應用程序可以像操作普通文件一樣操作硬件設備。
1.1設備的分類
Linux看待設備可區分為3種基本設備類型,分別為字符設備、塊設備和網絡設備:
①字符設備:字符設備是一種可以當作一個字節流來存取的設備,相當于一個文件,字符設備驅動通常實現open、close、read和write系統調用;②塊設備:如同字符設備,塊設備通過位于/dev目錄的文件系統結點來存取,塊設備驅動程序主要通過傳輸固定大小的隨機數據來訪問設備,塊設備驅動程序是核心內存與其他存儲介質之間的管道;③網絡設備:網絡接口和一個已經掛載的塊設備類似,網絡接口使用特定的內核數據結構注冊,與外界進行數據交換時調用,與塊設備只響應來自內核的請求不同,Linux內核的網絡子系統被設計成完全與協議無關,網絡驅動程序異步地接收來自外界的數據包。
1.2字符設備開發過程
本項目開發的驅動程序都是字符設備驅動程序,因此簡單介紹字符設備的開發過程。
1.2.1重要的文件操作
接口函數file_operation file_operation是一個字符驅動如何建立底層驅動與應用程序連接的結構體,包含以下重要的函數接口:
①int(*open)(struct inode*,struct file*):打開設備操作。
②ssize_t(*read)(struct file*,char__user*,size_t,loff_t*):從設備中獲取數據,非負返回值代表成功讀取的字節數。
③ssize_t(*write)(struct file*,const char__user*,size_t,loff_t*):發送數據給設備,非負返回值代表成功寫入的字節數。
④int(* ioctl)(struct inode*,struct file*,unsigned int,unsigned long):系統調用提供了發出設備特定命令的方法。
1.2.2設備打開與關閉
open方法在應用程序調用open()系統調用時被調用,作用是打開設備;release方法在應用程序調用close()系統調用時被調用,作用是關閉設備。
1.2.3驅動程序與應用程序交換
數據交換的方式最直接的方法是在struct file_operation中的read/write方法中與用戶空間的buffer進行數據的交換:unsigned long copy_to_user(void__user*to,const void*from,unsigned long count):從內核空間拷貝數據到用戶空間;unsigned long copy_from_user(void*to,const void__user*from,unsigned long count):從用戶空間拷貝數據到內核空間;1.2.4設備控制ioctl設備控制接口如下:①應用程序調用接口:int ioctl(int fd,unsigned longcmd,…):②設備驅動的相應接口:int(*ioctl)(struct inode*inode,struct file*filp,unsigned int cmd,unsigned long arg)。
應用程序通過ioctl發送命令,從而調用驅動接口的ioctl.因此,在Linux字符設備驅動程序中主要實現open、read、write和ioctl函數分別對應Linux系統調用的open、read、write和ioctl來完成數據交互和設備操作。
2溫度傳感器驅動軟件設計
DS18B20采用獨特的單總線接口方式,每只DS18B20都有一個唯一存儲在ROM中的64位編碼。最前面8位是單線系列編碼:28H,接著的48位是一個唯一的序列號,最后8位是以上56位的CRC編碼。通過單線總線端口訪問DS18B20的協議如下:①初始化;②發送ROM操作指令;③發送DS18B20功能指令。
主要功能指令,如表1所列。
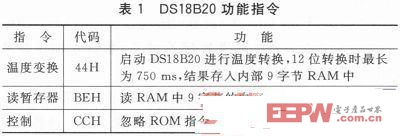
根據DS18B20的讀寫協議以及操作指令和功能指令,可以得出DS18B20的復位過程如圖1所示,寫操作流程如圖2所示,讀操作流程如圖3所示。
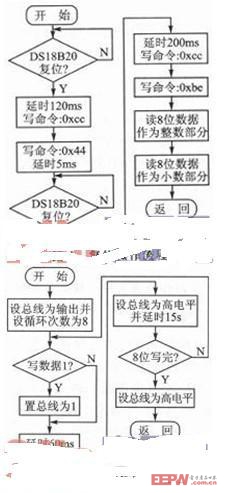
根據DS18B20復位、讀寫操作過程,利用Linux編寫DS18B20驅動程序。過程描述如下。
(1)復位操作流程
①設總線為輸出模式;②向總線發送一個上升沿,保持高電平100 ms;③向總線發送一個下降沿,保持低電平800 ms;④向總線發送一個上升沿,延時100 ms;⑤設總線為輸入模式;⑥判斷總線狀態,如果為低電平,則復位成功。
(2)寫操作流程
①設總線為輸出模式,并設置8次循環;②向總線發送一個下降沿,保持低電平;③判斷寫入數據是0還是1,如果是1,則向總線發送一個上升沿,保持高電平;如果是0,則保持總線低電平不變;④延時60 ms,設總線為高電平,再延時15 ms;⑤循環操作步驟②~④;⑥設總線為高電平。
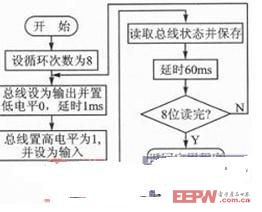
(3)讀操作流程
①設循環次數為8;②設總線為輸出,向總線發送一個下降沿,保持低電平,并延時1 ms;③向總線發送一個上升沿,并設為輸入;④讀總線狀態,并保存為1位,并延時60 ms;⑤循環操作步驟②~④,讀取1個字節數據。
(4)溫度讀寫過程
①循環判斷DS18B20直到復位,延時120ms;②寫入CCH命令,跳過讀序列號過程;③寫入44H命令,開始溫度轉換,延時5 ms;④循環判斷DS18B20直到復位,延時200 ms;⑤寫入CCH命令,跳過讀序列號過程;⑥寫入BEH命令,讀取寄存器;⑦讀溫度整數部分;⑧讀溫度小數部分。
(5)驅動程序編寫
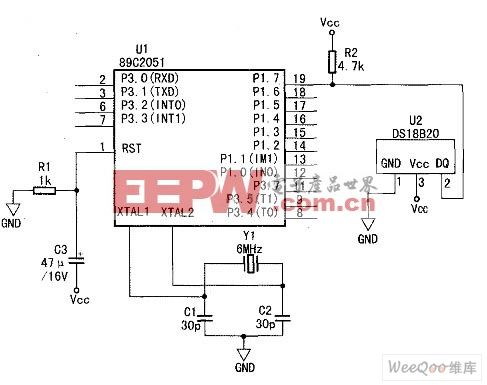
選定S3C2440一個GPIO引腳作為連接DS18B20的數據線,經過查電路圖和S3C2440的芯片手冊,選擇GPF3為連接引腳;主要對GPF的控制寄存器GPFCON和數據寄存器GPFDAT進行操作,GPF3主要對應GPFCON第6位和第7位,以及GPFDAT的第3位進行操作;對GPFCON[7:6]設00為輸人,設01為輸出;GPFDAT[3]設為輸入時,相應的位即為引腳的狀態,設為輸出則可以對引腳進行置1和置0操作;結合S3C2440的寄存器GPFCON和GPFDAT,以及DS18B20時序,可以利用C語言編寫Linux下驅動程序,本驅動程序采用實現read接口函數的字符設備驅動。
3部分代碼












評論