測量4通道解串器的偏移容限

介紹
TLVDS解串器的偏移容限用來表示其抖動容限。應用筆記3821:Skew Margin Measurement for 4-Channel (3 Data Channels Plus Clock Channel) LVDS Serializers/Deserializers 演示了利用串行器以及LVDS鏈路測量偏移容限的方法。本應用筆記介紹了如何采用一個解串器測量偏移容限,所提供的測試過程適用于任何LVDS解串器。
接收偏移容限(RSKM)
RSKM是指解串器可以正確采集LVDS輸入數據的有效時間窗口。為了在數據位周期內(單位間隔或UI)采集數據,需要由LVDS輸入時鐘產生一個定時選通信號。理想情況下,該選通信號位于數據脈沖的中間,因此最大RSKM靠近LVDS數據位周期的一半。然而,在很多非理想情況下,內部和外部條件會降低定時容限,使其接近采樣窗口的關閉點,從而產生數據“誤碼”。
下面列出了限制RSKM的芯片組內部參數:
解串器內部選通不確定,與數據建立和保持定時要求有關
發送脈沖位置變化,即串行器輸出的各數據位相對于串行器LVDS時鐘的位置有變化
其他降低RSKM的因素與LVDS鏈路有關,包括:
電纜偏移
碼間干擾(ISI)
從串行器傳遞到解串器的并行輸入時鐘抖動
改善RSKM
影響電纜偏移的主要因素是電纜長度、電纜類型以及電纜質量。以下建議有助于改善設計的RSKM:
采用短的、單位長度偏差(10–20ps/ft)較低的高質量電纜。注意,通道的總偏移還包括連接器和PCB布線產生的偏移。高質量連接器以及良好的電路板布線(例如匹配的布線長度)僅增加少量的偏移,甚至可以避免偏移。
采用短電纜、直流平衡模式以及線路均衡器將ISI的影響降至最低。
給串行器提供低噪聲輸入時鐘有助于改善數據/時鐘的抖動指標,并保持良好的偏移容限。同時,良好的傳輸線端接可避免反射,保持信號完整性,降低偏移。
推薦設備
Agilent 8133A脈沖發生器
Tektronix CSA8000或類似數字示波器
Tektronix P6248差分探頭
Tektronix 1103 TEKPROBE BNC電源
SMA電纜
直流電源
測試步驟
將解串器配置為直流平衡模式。圖1給出了交流耦合配置,圖2則給出了時鐘和數據之間的時序關系。
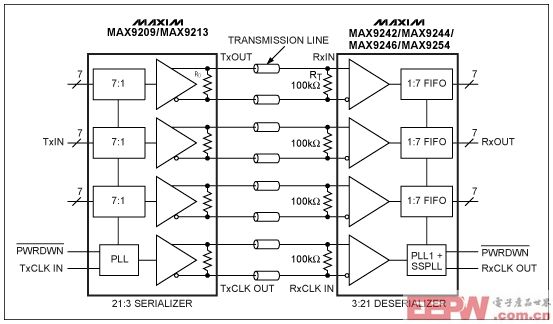
圖1. 直流平衡模式下,MAX9242/44/46/54解串器的交流耦合配置

圖2. 直流平衡模式下,解串器串行輸入時鐘和數據之間的時序關系
采用相同長度的電纜將Agilent 8133A脈沖發生器通道1的差分輸出連接至4通道解串器(MAX9236、MAX9244等)的RxIN0-和RxIN0+輸入。按照下列步驟正確配置:
選擇32MHz的時鐘頻率
選擇脈沖模式
采用11.1%占空比(1/9)
選擇COMP按鍵(信號兼容)
使用下列信號電平:高 = 1.5V,低 = 1.0V (直流失調 = VCM = 1.25V)
將Aglient 8133A脈沖發生器通道2的差分輸出連接至解串器的RxCLKIN+至RxCLKIN-輸入。采用相同的信號電平,重復步驟2a–2e。
圖3給出了按照步驟1–3所述方法得到的數據和時鐘信號波形
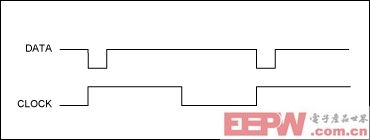
圖3.按照測試設置步驟1–3產生的數據和時鐘信號波形
使用采樣示波器配合差分探頭測量時鐘。隨后,將同一個探頭連接至差分數據輸入以進行如下測量:
圖4給出了時鐘和數據頭部錯位的情況。理想情況下,時鐘和數據相交于差分地電平。如果不是這樣,則延遲數據使其與時鐘對齊,請使用Aglient 8133A脈沖發生器通道2的“延遲”選項。通常叫做“延遲偏差”。

圖4. 時鐘與數據錯位/偏差
監視解串器的RxOUT0引腳。正常工作條件下,該引腳應為VCC。
增加數據延遲,同時采用萬用表監視RxOUT0電平。記錄RxOUT0信號由1變為0時的延遲值。記為:“+delay”。
接著,降低延遲至負區域,再次記錄RxOUT0由1變為0時的延遲值。記為:“-delay”。
“+delay”減去延遲偏差,即為“RSKM-”。“-delay”加上延遲偏差,記為“RSKM+”。圖5給出了RSKM-和RSKM+相對于解串器內部選通信號的范圍。
理想情況下,RSKM+和RSKM-應相等;然而,實際情況中兩者通常不同。注意RSKM+和RSKM-越接近相同的數值,器件的偏移容限就越好

圖5. RSKM+、RSKM-和選通信號的關系
Agilent是Agilent Technologies, Inc.的商標。
Tektronix是Tektronix, Inc.的注冊商標。
TEKPROBE BNC是Tektronix, Inc.的商標。



評論