基于霍爾傳感器的直流電機轉速測量設計

0 引 言
隨著單片機的不斷推陳出新,特別是高性價比的單片機的涌現,轉速測量控制普遍采用了以單片機為核心的數字化、智能化的系統。本文介紹了一種由單片機C8051F060作為主控制器,使用霍爾傳感器進行測最的直流電機轉速測量系統。
l轉速測量及控制的基本原理
1.1轉速測量原理
轉速的測量方法很多,根據脈沖計數來實現轉速測量的方法主要有M法(測頻法)、T法(測周期法)和MPT法(頻率周期法),該系統采用了M法(測頻法)。由于轉速是以單位時間內轉數來衡量,在變換過程中多數是有規律的重復運動。根據霍爾效應原理,將一塊永久磁鋼固定在電機轉軸上的轉盤邊沿,轉盤隨測軸旋轉,磁鋼也將跟著同步旋轉,在轉盤下方安裝一個霍爾器件,轉盤隨軸旋轉時,受磁鋼所產生的磁場的影響,霍爾器件輸出脈沖信號,其頻率和轉速成正比。脈沖信號的周期與電機的轉速有以下關系:
![]()
式中:n為電機轉速;P為電機轉一圈的脈沖數;T為輸出方波信號周期。根據式(1)即可計算出直流電機的轉速。
霍爾器件是由半導體材料制成的一種薄片,在垂直于平面方向上施加外磁場B,在沿平面方向兩端加外電場,則使電子在磁場中運動,結果在器件的兩個側面之間產生霍爾電勢。其大小和外磁場及電流大小成比例。霍爾開關傳感器由于其體積小,無觸點,動態特性好,使用壽命長等特點,故在測量轉動物體旋轉速度領域得到了廣泛應用。在這里選用美國史普拉格公司(SPRAGUE)生產的3000系列霍爾開關傳感器3013,它是一種硅單片集成電路,器件的內部含有穩壓電路、霍爾電勢發生器、放大器、史密特觸發器和集電極開路輸出電路,具有工作電壓范圍寬、可靠性高、外電路簡單、輸出電平可與各種數字電路兼容等特點。
1.2轉速控制原理
直流電機的轉速與施加于電機兩端的電壓大小有關,可以采用C8051F060片內的D/A轉換器DAC0的輸出控制直流電機的電壓從而控制電機的轉速。在這里采用簡單的比例調節器算法(簡單的加一、減一法)。比例調節器(P)的輸出系統式為:
![]()
式中:Y為調節器的輸出;e(t)為調節器的輸入,一般為偏差值;Kp為比例系數
從上式可以看出,調節器的輸出Y與輸入偏差值e(t)成正比。因此,只要偏差e(t)一出現就產生與之成比例的調節作用,具有調節及時的特點,這是一種最基本的調節規律。比例調節作用的大小除了與偏差e(t)有關外,主要取決于比例系數Kp,比例調節系數愈大,調節作用越強,動態特性也越大。反之,比例系數越小,調節作用越弱。對于大多數的慣性環節,Kp太大時將會引起自激振蕩。比例調節的主要缺點是存在靜差,對于擾動的慣性環節,Kp太大時將會引起自激振蕩。對于擾動較大,慣性也比較大的系統,若采用單純的比例調節器就難于兼顧動態和靜態特性,需采用調節規律比較復雜的PI(比例積分調節器)或PID(比例、積分、微分調節器)算法。
2系統的硬件軟件設計
2.1硬件設計
本系統采用單片機C8051F060作為主控制器,使用霍爾傳感器測量電機的轉速,通過7079最終在LED上顯示測試結果,硬件組成如圖1所示。此外,還可以根據需要調整控制電機的轉速。
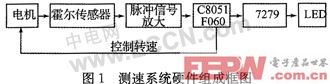
控制器C8051F060主要完成轉速脈沖的采集、16為定時計數器計數定時、運算比較,片內集成的12位DAC0控制轉速,并且通過7279顯示接口芯片實現數碼顯示等多項功能。
系統采用外部晶振,系統時鐘SYSCLK等于18432000,T0定時1 ms,初始化時TH0=(-SY-SCLK/1 000)》8;TL0=-SYSCLK/1 000。等待1 s到,輸出轉速脈沖個數N,計算電機轉速值。將1 s內的轉速值換算成1 min內的電機轉速值,并在LED上輸出測量結果。
2.2軟件設計
本系統采用C8051F060中的IWT0中斷對轉速脈沖計數。定時器T1,工作于外部事件計數方式,對轉速脈沖計數;T0工作于定時器方式,均工作于方式1。每到1 s讀一次計數值,此值即為脈沖信號的頻率,根據式(1)可計算出電機的轉速。由于直流電機的轉速與施加工于電機兩端的電壓大小有關,故將實際測得的轉速值與預設的轉速值比較,若大于預設的轉速值則減小DAC0的值調整電機的轉速,直到轉速值等于預設定的值,這樣就實現了對電機轉速的控制,程序流程如圖2、圖3所示。

3實驗測試結果
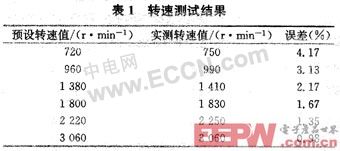
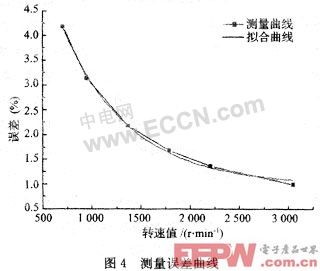
根據實驗測試和誤差分析繪制了測量誤差曲線,如圖4所示。誤差分析表明,轉速測量誤差在5%以內,并且隨著轉速預設值的增加測量誤差愈小,呈指數形式下降,函數關系如式(3)所示。
4結論
本測速系統彩集成霍爾傳感器敏感速率信號,具有頻率響應快,抗干擾能力強等特點。霍爾傳感器的輸出信號經信號調理后,通過單片機對連續脈沖記數來實現轉速測控,并且充分利用了單片機的內部資源,有很高的性價比。經過測試并對誤差進行分析發現,該系統的測量誤差在5%以內,并且在測量范圍內轉速越高測量精度越高。所以該系統在一般的轉速檢測和控制中均可應用。









評論