圖像型電子警察系統抓拍延時測量方法設計

3.2 軟件程序設計
軟件設計主要包括觸發判斷和計時顯示兩部分。
3.2.1 觸發判斷
判斷何時啟動計時電路開始計時。單片機串口通過緩沖器SBUF接收雷達的速度數據,接收一個比特數據,清除RI標志位,然后再接收下一個數據。抓拍方式不同(車頭或車尾抓拍),則觸發的條件也不同,觸發判斷如見表l所示。
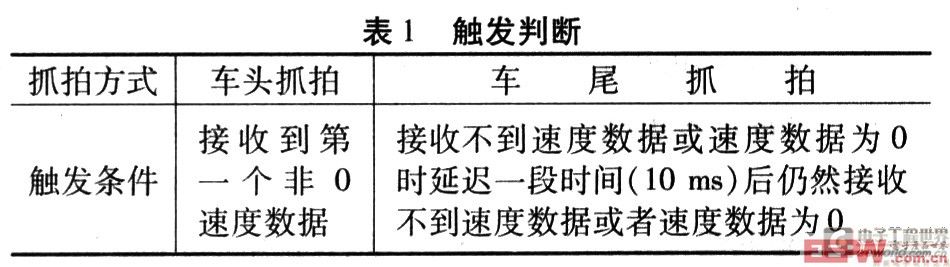
采用車尾抓拍時,由于觸發判斷時加入了延時,計時電路從10開始計時。
3.2.2 計時顯示
以毫秒為單位進行計時和顯示控制,關鍵是配合拍攝需求的靜態顯示控制,即3位數字同時點亮。具體過程是:設定單片機定時器初值使其產生1 ms定時中斷,1ms定時時間到則相應位計數加1,選通相應使能位(個位對應P2.0,十位對應P2.1,百位對應P2.2),通過查表將相應的數字轉換為顯示碼,當計時時間達到999 ms時停止計時顯示。圖3給出個位的計時顯示控制程序流程。
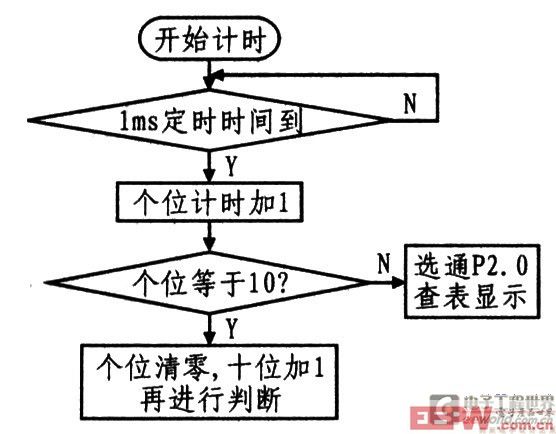
圖3 個位的計時顯示控制程序流程
注意:數碼管的時間顯示間隔應與攝像機的拍攝速度相匹配,即要求曝光時間小于時間分辨率。如為了獲得1 ms的延時測量分辨率,應將電子警察的快門速度控制在1/l 000 s以下;若快門速度為1/500 s,時間分辨率只能達到2 ms。若兩者不匹配,曝光時間大于時間分辨率,則導致時間顯示重疊,無法讀取正確的時間數值。
4 實驗結果
將該計時顯示器應用于雷達型電子警察系統,采用具有外觸發功能的攝像機抓拍,進行延時測試,分別測量車頭抓拍和車尾抓拍的延時,每組測量50個數據。實際測量中,該電子警察系統在車頭抓拍時最大延時12 ms,最小延時6 ms,延時非常小,且延遲量穩定。在實驗測量車尾抓拍延時時(控制器判斷車輛離開的延遲設為500 ms)發現延遲最大值為757 ms,最小值為748 ms,雖然延時較為穩定,但總延遲時間較長。在車速高的區域基本不能使用。
5 結語
結果說明,該計時顯示器設計的測量方法能方便有效地測量雷達型電子警察系統的抓拍延時。針對不同視頻的抓拍系統,只需更改相應的計時顯示器輸入端觸發方式,即可實現延時測量。因此,該方法具有較好的適應性,擴展性及參考價值。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理

評論