LabVIEW機器人模塊-機器人選板中的特殊算法

概覽
本教程對LabVIEW機器人模塊軟件自帶的機器人算法進行介紹。從傳感器直至路徑規劃,您都可以使用這個產品來設計新一代的復雜的自動化系統。
LabVIEW機器人模塊帶有全新的功能完備的“機器人”選板,其中包含了設計下一代機器人控制器所需的全新算法。這個全新的函數選板包含了從傳感器驅動程序直至反向運動學的所有功能。詳情請參考LabVIEW幫助(見下面的鏈接),了解關于機器人VI的更多信息。
?利用連接VI與其他機器人軟件一起工作,包括例如Cogmation、MobileRobotics、Skilligent以及Microsoft的第三方產品。
?使用回避障礙物VI,實現移動機器人車輛的回避障礙物功能。
?使用路徑規劃VI,在表示機器人周圍環境的地圖中計算到達目標點的路徑長度。
?使用協議VI,在LabVIEW中處理格式化為不同通信協議的數據,例如通過傳感器發送的數據。
?使用機器人手臂VI,創建一個虛擬的機器人手臂并與其進行交互。您可以實現手臂上的動力學與運動學計算、對手臂進行仿真,并對機器人手臂進行原型開發。
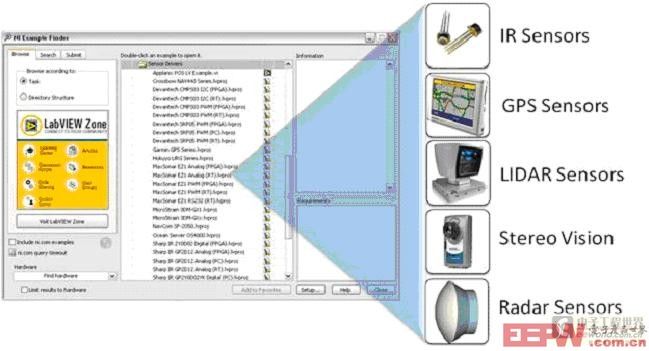
?使用傳感器VI,可以配置、控制并恢復機器人系統中常用儀器的數據,例如串行設備和USB設備。瀏覽儀器I/O選板或使用NI儀器驅動程序搜索器,搜索并安裝其他儀器驅動程序。
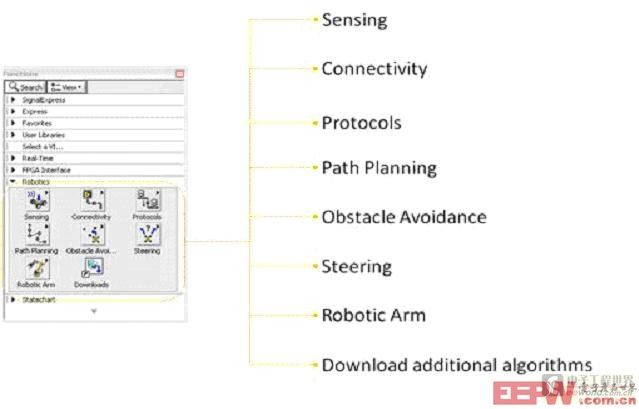
圖:LabVIEW機器人模塊帶有全新的完整“機器人”選板,其中包含了設計下一代機器人控制器所需的全新算法。
連接傳感器與執行器
從LabVIEW編程語言的第一個版本開始,它就一直通過連接儀器和設備,為工程師節省時間。現在的LabVIEW是使 用高質量的豐富儀器驅動程序來連接儀器的行業標準。LabVIEW機器人模塊利用這個優點,將整套機器人傳感器和執行器連接在一起。這些驅動程序免去了耗 費時間的機器人系統驅動程序編寫、測試以及實現過程。實際上,LabVIEW機器人模塊包含許多傳感器驅動程序版本,用于Windows、實時模塊和基于 FPGA的平臺,確保您能夠適當地連接到傳感器,以滿足您的I/O輸入需求。











評論