一種基于紅外線的轉(zhuǎn)速測(cè)量儀研究及設(shè)計(jì)

3.2.2 軟件結(jié)構(gòu)劃分
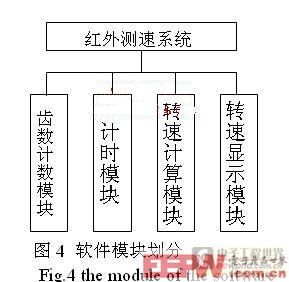
采用結(jié)構(gòu)化軟件設(shè)計(jì)的方法,使得設(shè)計(jì)簡單,易于調(diào)試和移植,提高編程效率。采用結(jié)構(gòu)化設(shè)計(jì)軟件的方法將本系統(tǒng)軟件劃分為圖4所示的4個(gè)模塊:齒數(shù)計(jì)數(shù)模塊、計(jì)時(shí)模塊、轉(zhuǎn)速計(jì)算模塊和轉(zhuǎn)速顯示模塊。其中最主要的是計(jì)時(shí)模塊和轉(zhuǎn)速計(jì)算模塊
(1) 計(jì)時(shí)模塊
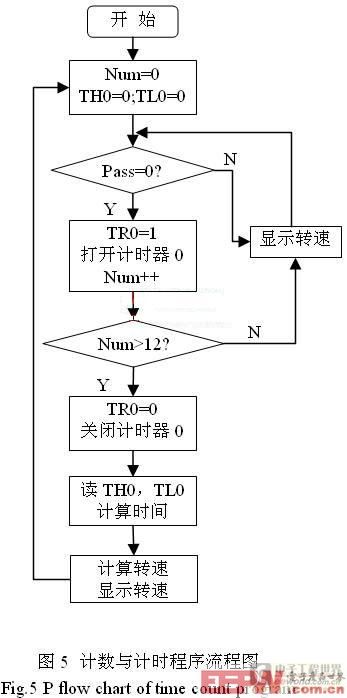
由圖2可知當(dāng)紅外線發(fā)射管發(fā)射的紅外線未被輪齒擋住時(shí),接收管受紅外線照射呈導(dǎo)通狀態(tài),經(jīng)反相器輸入到單片機(jī)中斷端口的電壓為高電平,不產(chǎn)生中斷;而當(dāng)紅外線發(fā)射管發(fā)射的紅外線被輪齒擋住時(shí),接收管不受紅外線照射則呈截止?fàn)顟B(tài),經(jīng)反相器輸入到單片機(jī)中斷端口的電壓跳變?yōu)榈碗娖健亩せ钪袛喑绦驅(qū)γ}沖進(jìn)行計(jì)數(shù)。計(jì)數(shù)流程圖如圖5所示。由于計(jì)數(shù)需要與計(jì)時(shí)同步,所以需要在產(chǎn)生第一次紅外光被擋住時(shí)(紅外光被擋住時(shí)Pass=0,反之Pass=1),也即中斷口電位由高變低時(shí)打開定時(shí)器。由于實(shí)驗(yàn)中的齒盤共有108個(gè)齒,為了提高測(cè)量的實(shí)時(shí)性,把108個(gè)齒分成9等份
,當(dāng)計(jì)數(shù)值(Num)為12時(shí)關(guān)閉定時(shí)器并讀取定時(shí)器的計(jì)時(shí)值。


評(píng)論