基于嵌入式的裂紋實時測量系統的設計

1.3 Sobel邊緣檢測
以上小節得出了裂縫的候選集合,但是事實上這個候選集合含有大量的非裂縫區域。這一節中的主要內容是設計算法剔除這些干擾裂縫,獲取更小的裂縫候選集合。在試驗中,由于裂縫具有明顯的邊緣,而干擾圖像區域有比較模糊的邊緣或者僅有一個邊緣等,通過分析,提出采用Sobel邊緣檢測的方法進行裂縫位置的鎖定。Sobel算子由兩個卷積核組成,如圖4所示。
通過對原始圖像采用Sobel邊緣檢測得到如圖5所示結果。
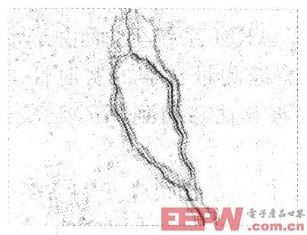
Sobel邊緣檢測結果圖像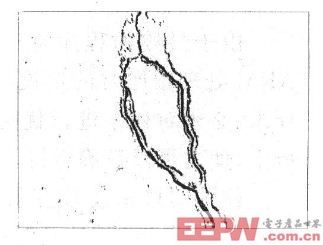
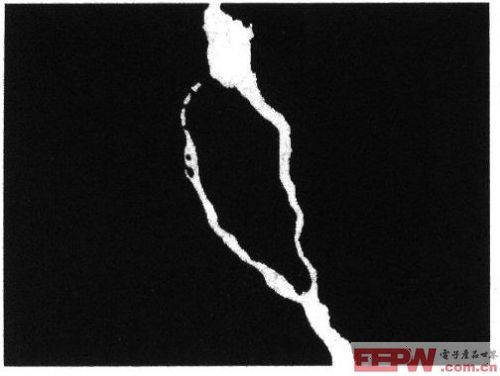
OTSU分割后的結果
但是,這個結果很明顯存在很多微小的干擾,這些干擾必須予以剔除,否則將對鎖定裂縫邊緣沒有任何效果。通過對邊緣檢測結果圖像仔細分析發現,雖然存在微小干擾,但是他們的灰度值普遍偏小,針對這一發現,對緣檢測結果圖像做與上一節中一樣的圖像分割,這會將微小的干擾有效地剔除。如圖6所示。
同過對分割后的邊緣圖像進行觀察,圖像仍然存在一些微小的干擾,但這些干擾相對于未處理的緣檢測結果圖像已經很少,將在后續的處理中對圖像裂縫添加附加約束,從而取出這些干擾的影響。
1.4 基于裂縫特征的附加約束
通過對大量的裂縫圖像進行分析,發現圖像裂縫有如下特點:
(1)裂縫灰度值低于墻體的灰度值。
(2)裂縫的寬度相對于整個圖像不超過圖像寬度的1/3。
(3)污染的墻體區域一般呈大的塊狀出現,且很多僅含有一個邊界,另一邊界延伸至圖像外面。
(4)墻體的一些微小的干擾呈小塊狀出現。
(5)裂縫一般為帶狀。
使用ARM處理器處理圖像,由于其速度慢且有實時性要求,故不能處理整張的圖像,換句話說,必須處理局部圖像。這就很明顯增加了剔除候選裂縫的難度。該系統顯然是無法使用特點(4)、特點(5)的。
通過添加以上約束,實驗效果有了明顯的提高。
圖7是PC機的結果,由于同時使用了5個約束效果比較好。圖8是ARM系統運行的截圖,由于在ARM上不方便分步計算出每一個步驟,故直接給出了帶有測量結果的截圖。
PC機計算結果




評論