一種基于超聲波和紅外的測(cè)距定位系統(tǒng)
作者:
時(shí)間:2012-02-09
來(lái)源:網(wǎng)絡(luò)
收藏
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
5 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)工作時(shí)首先啟動(dòng)紅外線傳感器進(jìn)行探測(cè),當(dāng)檢測(cè)到有障礙物存在時(shí),再啟動(dòng)超聲波傳感器進(jìn)行測(cè)距,然后通過(guò)LED進(jìn)行顯示。如果檢測(cè)到的物體在超聲波傳感器的測(cè)量盲區(qū)內(nèi),則根據(jù)紅外線傳感器的響應(yīng)情況對(duì)距離進(jìn)行估計(jì)顯示。對(duì)應(yīng)上述功能的程序框圖如圖16所示。
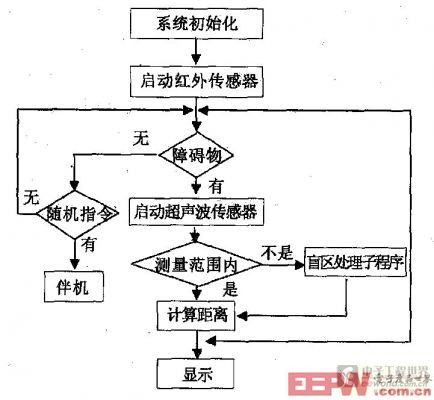
圖16 系統(tǒng)程序框圖
6 結(jié)語(yǔ)
本文采用超聲波傳感器和紅外線傳感器組成綜合測(cè)距定位系統(tǒng),克服了由單一傳感器所構(gòu)成探測(cè)系統(tǒng)的不足,同時(shí)具備了超聲波傳感器和紅外線傳感器探測(cè)的優(yōu)點(diǎn),能夠比較精確地測(cè)距和定向。同時(shí),系統(tǒng)還采用了單片機(jī)控制技術(shù),使系統(tǒng)具有良好的擴(kuò)展性和實(shí)用性。










評(píng)論