ZigBee無線傳感器網絡的振動數據采集系統設計

數據采集技術是獲取信息的主要手段和方法,它是以傳感器技術、測試技術、電子技術和計算機技術等為基礎的一門綜合應用技術。常用的數據采集多采用傳感器,經過一定的數據變換與計算機通過串口或USB接口相連,由計算機讀取傳感器數值。隨著相關基礎技術的發展,以嵌入式計算機為核心的數據采集系統逐步形成,并占據了測控領域的統治地位[1]。振動量是測控應用中常要采集的一類數據,如機器的運行狀態、動物的運動量等,都可以通過振動量反應出來。在實際應用中,有線檢測往往出現布線困難、擴展性移植性差等問題,因此,無線檢測系統逐漸進入了工程人員視野,最值得期待的便是ZigBee無線網絡的應用。ZigBee技術主要應用在短距離小范圍內以及數據傳輸速率不高(20~250 kb/s)的各種電子設備之間,其典型的傳輸數據類型有周期性數據(如傳感器)、間歇性數據(如照明控制)和重復低反應時間數據(如鼠標)[2]。可以看出,ZigBee無線網絡應用于數據采集具有其先天優勢。
1 系統基本構架
無線振動數據采集系統如圖1所示,左邊為無線傳感器網絡,右邊為數據采集終端。采集終端為一臺嵌入式計算機,負責接收傳感器數據并進行相關處理;外接一個ZigBee網絡的協調器節點,完成對無線網絡的管理。在傳感器網絡一端,各個傳感器均接有一個ZigBee節點,其中大部分功能屬于終端節點,在網絡需要的情況下,可將部分終端節點配置為路由節點使用,以支持不同的網絡拓撲結構。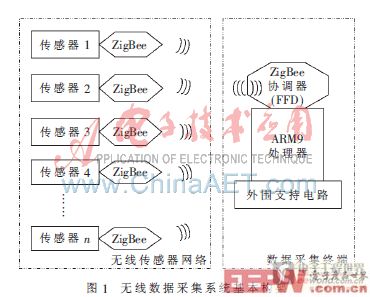
2 硬件設計
系統硬件設計包括三種模塊:ARM9處理器及其外圍支持電路為一塊完整的工業控制核心板;ZigBee網絡節點的各功能節點采用獨立的模塊,模塊上集成了射頻收發器及控制單片機;傳感器電路需自行設計,將制作成的電路板加接到ZigBee節點即可。
2.1 ARM9處理器及其外圍電路
為了縮短系統的開發周期,設計中采用了成都某公司EM916x工業控制核心模塊。該核心模塊使用了一片AT91SAM9260的32位CPU,內存有32 MB和64 MB可選,板載有32 MB的Flash,用戶可使用其中的一半,并且還集成了標準的MiniSD卡插槽,即插即用,為終端數據的存儲提供了便利。在通信接口方面,EM9160配置了一路以太網接口,可用至多6路的標準UART串口,兩路USB主控接口等[3]。
EM916x模塊緊湊的集成設計,豐富的接口資源大大減少了設計數據采集終端的工作量,用戶幾乎不用做更多的外圍電路設計,只需將要使用的接口按要求引出到標準接頭即可。
2.2 ZigBee無線開發套件
本設計選擇了成都某公司的C51RF系列ZigBee無線開發系統套件。該套件提供ZigBee開發所需的全套軟硬件,包括ZigBee2006協議棧,完全滿足IEEE802.15.4標準和ZigBee技術標準。套件使用無線單片機CC2430,是一個真正的SoC解決方案,它內部結合了一個高性能2.4 GHz直接序列擴頻(DSSS)射頻收發器核心和一個工業級小巧高效的增強型8051控制器。CC2430具有性能高、功耗低、收發靈敏度高和抗干擾性強等特點,尤其是在休眠模式下,器件的功耗尚不到1 μA,以之構建無線傳感器網絡能夠在電池供電的情況下大大延長傳感器的使用時限[4]。
2.3 傳感器電路
常用的振動傳感器分為壓電/駐極體/電磁型、彈簧型、機械接觸型等。CLA-3微型傳感器是一種采用新型高靈敏度傳感膜設計的全向振動傳感器。CLA-3的靈敏度可調,抗干擾性好,輸出為準數字信號,對于信號的后期處理相對比較簡單。使用時必須采用剛性連接,如使用粘結膠固定,以減小振源與傳感器之間的衰減[5]。圖2為本設計中使用的檢測電路,經過調理的振動傳感器信號輸出為方波,對方波進行計數即可獲得振動數據。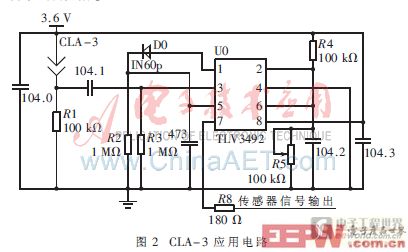
2.4 硬件集成
集成后得到無線采集系統的硬件框圖如圖3所示。EM916x核心板與CC2430通過RS232串口相連,在核心板一端,除DEBUG串口外均可使用,而CC2430自帶兩個USART口,可使用其中任何一個;CAL-3傳感器與CC2430的連接相對簡單,只需將CAL-3應用電路的信號輸出端接入CC2430的一個數字I/O口,在程序中以中斷的方式讀取該I/O口的計數即可。
ZigBee以獨立的工作節點為依托,通過無線通信組成星狀、樹狀或網狀網絡,每個節點都擁有一個唯一的64 bit IEEE地址,而其功能并不完全相同。從組網通信上來說,半功能設備RFD(Reduced Function Device)只是其功能的一個子集;全功能設備FFD(Full Function Device)則與所控制的子節點通信、匯集數據和發布控制,或起到通信路由的作用。無論采用哪種拓撲網絡,每個網絡都只能有唯一的協調器,它由全功能設備構成,相當于一臺服務器,負責對整個網絡的管理。FFD可作協調器、路由器以及終端節點使用,RFD只能用作終端節點。
本設計中無線傳感網絡采用圖3所示的樹狀拓撲結構,與EM916x工控板相連的屬于FFD設備,作為網絡的協調器。而振動傳感器端既可以接RFD設備作為終端節點,也可以接FFD設備。與FFD設備相接的傳感器作為終端節點使用的同時,還具備路由功能,并能接收終端節點的入網請求,它類似于一臺有線網絡的路由器,通過中繼轉發及路由選擇,可大大擴展無線網絡的覆蓋范圍,提高通信穩定性以及網絡容量。











評論