基于CAN總線的三級智能火災報警系統設計

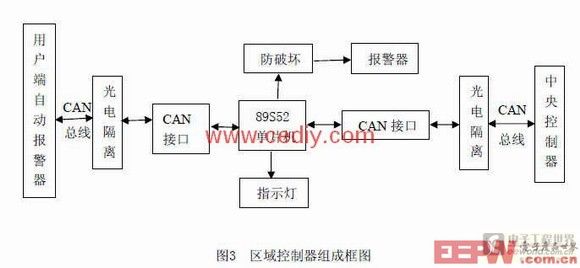
區域控制器組成框圖如圖3所示。區域控制器選用Intel的89S52單片機芯片為控制核心,在其與用戶端報警器相連的CAN端口側,安裝了CAN總線收發器,以及光耦隔離防干擾裝置,解決了與用戶端報警器之間的信號交換問題。而與中央控制主機相連的CAN端口側,同樣安裝了CAN總線收發器,解決與中央控制主機之間的信號交換問題。另外,加入防破壞識別模塊和報警器模塊可使物業監控主機及時發現對區域控制器線路的人為破壞,并及時修復。
3.3 中央控制器的硬件設計
中心中央控制器是主控計算機與區域控制器之間的橋梁、紐帶,負責主控計算機與區域控制器之間的指令、數據的存儲與傳輸。智能小區的每個房間都安裝一個用戶端自動報警器,因此不止需要一個區域控制器,由于通訊距離、速度和質量的限制,不可能每一個區域控制器都和主控計算機之間直接進行指令和數據的通訊,所以采用中央控制器作為中間橋梁,將區域控制器的報警信息等數據事先存在中央控制器,等待主控計算機查詢。
中央控制器組成結構和區域控制器類似。不同的是中央控制器主要完成主控計算機的RS-232信號和區域控制器的CAN信號之間的轉換,它是主控計算機和區域控制器之間的橋梁,是數據的中間存儲站。
3、結論
針對我國現有智能小區的發展趨勢,本文提出了適用于大、中型智能小區的基于CAN總線的三級智能火災報警系統的設計方案。該智能火災報警系統在前端火災探測部分采用多元無線報警的方案,這樣可以大大的減少誤報率和漏報率,提高了系統的可靠性,同時不需另外接線。而它的網絡采用基于CAN總線的三級通信網絡,實現最優的性能價格比和最廣的應用覆蓋面,提高產品的競爭能力,擴展特別的方便。本文作者的創新點:火災報警系統中通信網絡采用基于CAN總線的三級通信網絡,以及采用多元無線報警器。








評論