一種具有實時振動補償的顯示模塊的設計

還要考慮加速度的噪聲會因為積分而被放大,使積分結果不準。加速度噪聲的來源有:傳感器本身的噪聲、周邊電路的電磁串擾、電源的波動、負載的波動(OLED的功耗與被點亮的點數成比例)。MMA7260QT傳感器內部集成信號電路輸出紋波較小(nRMS=4.7mVrms),為了濾去由于電磁干擾等引起的高頻噪聲,給系統加一個通頻帶在50Hz內的RC低通濾波器。由于模擬濾波器難以調整,系統的軟件還加入了簡單而且快速的數字慣性濾波器,能很好地消除周期性干擾和較寬頻率的隨機干擾信號。
實時輸出具有相反方向偏移量的動態圖像
上文已述及處理器的運算速度和顯示器件的響應速度是兩個關鍵。本系統顯示器件選擇OLED器件即有機發光二極管(Organic Light-Emitting Diode,OLED)該顯示器件具有輕薄、易攜、全彩、高亮度、省電、視角寬廣及高應答速度等優點,為未來人機互動的接口開啟了新的紀元,如今采用OLED作為顯示器件的電子產品幾乎已經普及。
本系統所采用的OLED顯示材料的響應時間在μs量級,OLED器件的驅動芯片SSD1303的并行總線寫入時間僅為300ns,因此總的響應時間(包括驅動芯片的延遲和OLED材料的延遲)仍然是μs,只要MCU速度足夠快,是完全能實現圖像的動態顯示的。另外SSD1303支持垂直偏移指令和水平滾動指令,因此只需將GDDRAM一次寫滿,圖像需要平動時僅需要寫一條偏移或滾動指令,而不是刷新整個GDDRAM。
本系統所采用的微控制器MC9S08QG8工作頻率高達20MHz,有8kBytes的FLASH存儲器,512Bytes的RAM。如果處理器僅用來完成圖像數據的變換和GDDRAM的刷新是沒有問題的,但是處理器還要進行數字濾波等處理,難以完成所有的工作,因此系統采用偏移或滾動指令來實現平動。
顯示模塊與信源的通訊
為了方便與信源接口,本系統采用MC9S08QG8自帶的SPI控制器,提供SPI接口作為信號輸入通道。考慮到顯示模塊可能工作在比較惡劣的場合,通訊線纜連接固定的信源和振動的顯示模塊,會因為長期的彎曲而疲勞破壞,本系統特意設計集成了單片射頻收發芯片,可以進行短距離無線數據傳輸。單片射頻收發芯片采用挪威Nordic VLSI公司推出的單片射頻收發芯片nRF905,它能簡單地實現200m范圍內的傳輸速率在100kb/s內的數據傳輸。
硬件描述
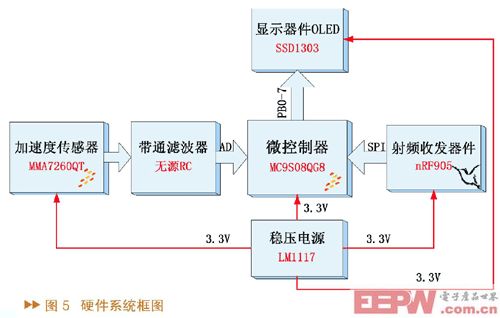
本系統的硬件框圖如圖5所示。整個硬件系統由微控制器電路、加速度傳感器電路、濾波器電路、OLED電路、射頻收發電路和穩壓電路組成。
本系統所設計的微控制器電路如圖6所示,MC9S08QG8包含上電復位電路(POR)和內部時鐘源(ICS),這會簡化微控制器電路且減少外部時鐘電路造成的高頻干擾。MC9S08QG8具有單線的背景調試接口(BDM),能夠進行實時總線捕捉,系統采用BDM進行系統調試并附加LED作為工作指示。

OLED電路





評論