基于CPLD的電磁扳機(jī)控制儀設(shè)計

引言
本文引用地址:http://www.104case.com/article/247433.htm靶場測試領(lǐng)域中槍械的擊發(fā)是一個重要的環(huán)節(jié)。傳統(tǒng)的槍械擊發(fā)采用人工方式,即射擊人員聽到射擊指令后手工扣動槍械扳機(jī)進(jìn)行擊發(fā),這種方式存在兩方面的問題:其一,無法保證安全性。人員操作時有可能由于疲勞或者聽錯指令進(jìn)行了誤操作,則可能造成靶道內(nèi)人員安全事故,而在有些應(yīng)用場合,如防彈頭盔穿甲實驗,射擊人員必須面對防彈頭盔進(jìn)行射擊,彈頭有可能反彈回來傷及射擊人員。上述兩種安全事故在國內(nèi)靶場都曾發(fā)生過。其二,隨著靶場測試技術(shù)的不斷發(fā)展,靶場測試所用的設(shè)備種類越來越多,精度也越來越高,因此,不同的測試設(shè)備如何保持一定的同步性顯得越來越重要。顯然,手工擊發(fā)槍械方式難以實現(xiàn)同步性要求。
基于以上考慮,有人提出了基于電磁效應(yīng)的控制方法,由鐵芯、線圈、銜鐵、簧片等組成,當(dāng)需要控制槍械擊發(fā)時,向線圈兩端加上一定電壓,線圈中便會流經(jīng)電流,從而產(chǎn)生電磁效應(yīng),銜鐵就在電磁力的作用下克服彈簧的拉力吸緊鐵芯,以帶動扳機(jī)運動。當(dāng)需要釋放扳機(jī)時,斷開線圈兩端電壓,電磁力消失,銜鐵在彈簧拉力的作用下,恢復(fù)原位釋放扳機(jī)。多次試驗后,證實該方法可行,但存在一定的弊端。如銜鐵位置的恢復(fù)依賴于彈簧的拉力,長時間使用后彈簧會產(chǎn)生疲勞現(xiàn)象,另一方面,線圈方式工作時,會有較大的沖擊電流,這會給電網(wǎng)及其他設(shè)備帶來干擾,甚至?xí)痍P(guān)鍵設(shè)備誤觸發(fā)。
針對上述問題,設(shè)計了基于CPLD技術(shù)的槍械電磁扳機(jī)控制儀。
1電磁扳機(jī)控制儀總體構(gòu)成
為了保證電磁扳機(jī)控制儀安全可靠地工作,必須設(shè)計一定的邏輯互鎖機(jī)構(gòu),設(shè)計中采用CPLD實現(xiàn)電路邏輯功能,步進(jìn)電機(jī)作為執(zhí)行單元。
電磁扳機(jī)控制儀總體構(gòu)成如圖1所示。

圖 1中,電磁扳機(jī)控制儀由CPLD邏輯控制器、RS232通訊模塊、電機(jī)驅(qū)動器以及步進(jìn)電機(jī)構(gòu)成。其中,CPLD完成邏輯控制及串口通訊功能,電機(jī)驅(qū)動器接收邏輯指令驅(qū)動步進(jìn)電機(jī)工作。應(yīng)用CPLD在線可編程技術(shù)及串口通信技術(shù),設(shè)計的控制儀具有很高的現(xiàn)場可編程功能及組網(wǎng)功能,可與其他測試設(shè)備實現(xiàn)整體測試系統(tǒng)的同步性、自動化及網(wǎng)絡(luò)化。由于電磁扳機(jī)控制儀應(yīng)用在靶場環(huán)境,因此其使用的安全性是一個關(guān)鍵指標(biāo),新設(shè)計的控制儀克服了舊儀器的諸多問題,充分考慮了電磁兼容性,現(xiàn)場可操作性以及測試安全性等因素,從設(shè)計上最大程度的保證了使用的安全性。
槍械電磁扳機(jī)控制儀控制面板示意圖如圖2所示。

從消除干擾確保穩(wěn)定的角度出發(fā),首先是在設(shè)計CPLD控制板時,在電源地之間加入了大量的濾波電容,在數(shù)據(jù)通道上加入光電隔離,控制信號的長線輸出采用雙絞線輸出并且接口均采用軍品航空插頭,以避免在傳播路徑中引入干擾;在步進(jìn)電機(jī)執(zhí)行單元,加入電磁屏蔽盒,消除電機(jī)動作時帶來的電磁干擾。
從測試安全的角度出發(fā),在控制面板上加入了解閉鎖開關(guān),確保了系統(tǒng)的總體控制;同時在“觸發(fā)”和“復(fù)位”按鍵的邏輯上加入互鎖功能,保證操作的正確性,從而消除誤操作現(xiàn)象。
2機(jī)械部分設(shè)計
現(xiàn)有的扳機(jī)控制儀大多采用電磁原理設(shè)計,存在的主要弊端有:彈簧長時間使用后容易產(chǎn)生疲勞現(xiàn)象;銜鐵在吸合過程中容易產(chǎn)生較大的沖擊電流,影響電網(wǎng)穩(wěn)定,而且還會影響其他測試儀器的正常工作等。針對這些問題,設(shè)計者利用電機(jī)驅(qū)動器驅(qū)動步進(jìn)電機(jī)來代替原有機(jī)構(gòu),可以對扳機(jī)操作進(jìn)行精確控制。
機(jī)械部分結(jié)構(gòu)圖如圖3所示。
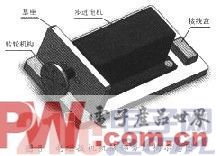
電磁扳機(jī)控制儀的機(jī)械部分主要由步進(jìn)電機(jī)、基座、轉(zhuǎn)輪機(jī)構(gòu)、扳機(jī)連桿、連線盒及電磁扳機(jī)屏蔽外殼構(gòu)成。其工作過程為:步進(jìn)電機(jī)接收驅(qū)動器指令進(jìn)行轉(zhuǎn)動,帶動轉(zhuǎn)輪機(jī)構(gòu)轉(zhuǎn)動,步進(jìn)電機(jī)旋轉(zhuǎn)一周,轉(zhuǎn)輪機(jī)構(gòu)帶動扳機(jī)實現(xiàn)一次行程,完成擊發(fā)動作。
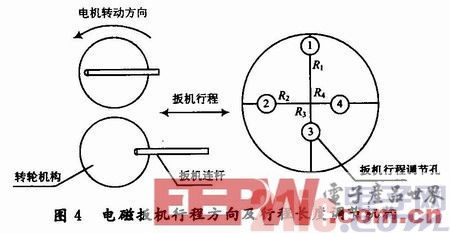
圖4為電磁扳機(jī)行程方向及行程長度調(diào)節(jié)機(jī)構(gòu)示意圖,轉(zhuǎn)輪機(jī)構(gòu)上設(shè)計有扳機(jī)行程調(diào)節(jié)孔(圖中①、②、③、④,四個調(diào)節(jié)孔距轉(zhuǎn)輪機(jī)構(gòu)中心半徑逐漸縮小R1>R2>R3>R4),扳機(jī)連桿的長度也可以調(diào)整。通過這兩個機(jī)構(gòu)的調(diào)節(jié),可以調(diào)整扳機(jī)的行程距離。
步進(jìn)電機(jī)由電機(jī)驅(qū)動器接高壓進(jìn)行驅(qū)動,通過CPLD控制器產(chǎn)生邏輯控制信號,實現(xiàn)扳機(jī)的控制。控制器與電機(jī)驅(qū)動器之間通過長絞線連接,測試儀與電機(jī)等干擾源距離較遠(yuǎn)且測試人員可以通過遠(yuǎn)距離控制槍械的擊發(fā),既保證了控制系統(tǒng)不受電磁干擾,又確保了測試人員的安全。
3控制部分設(shè)計
3.1CPLD邏輯控制部分
電磁扳機(jī)控制儀采用步進(jìn)電機(jī)作為執(zhí)行單元,CPLD作為主控制器實現(xiàn)邏輯控制和通信功能。邏輯控制部分實現(xiàn)按鍵的判讀、鎖存,觸發(fā)和復(fù)位的互鎖以及步進(jìn)電機(jī)驅(qū)動器的控制功能。
控制儀由“解閉鎖開關(guān)”作為儀器功能的總開關(guān),閉鎖時,儀器面板所有按鍵不工作;解鎖后,控制儀工作正常。電機(jī)動作由“復(fù)位”和“觸發(fā)”按鍵配合工作,當(dāng)擊發(fā)允許時,按下“觸發(fā)”按鍵,槍械擊發(fā)并鎖存觸發(fā)鍵,若繼續(xù)按觸發(fā)鍵則儀器不觸發(fā);當(dāng)需要再次擊發(fā)時,必須按“復(fù)位”鍵后,解除觸發(fā)鎖存,然后按下觸發(fā)按鍵觸發(fā)儀器。通過“復(fù)位”和“觸發(fā)”按鍵的相互鎖存,來確保控制儀的安全觸發(fā)。圖5為CPLD電路邏輯功能仿真時序圖。
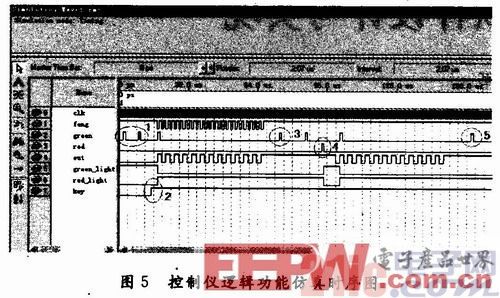
圖5中左邊Name欄定義管腳:clk為CPLD輸入時鐘1MHz;feng為系統(tǒng)工作時的分頻時鐘;green和red分別代表“觸發(fā)”、“復(fù)位”按鍵;out為邏輯輸出端;key為解閉鎖開關(guān)。
雙絞線傳輸器相關(guān)文章:雙絞線傳輸器原理 網(wǎng)線測試儀相關(guān)文章:網(wǎng)線測試儀原理












評論