一種基于磁電式的角度傳感器設計

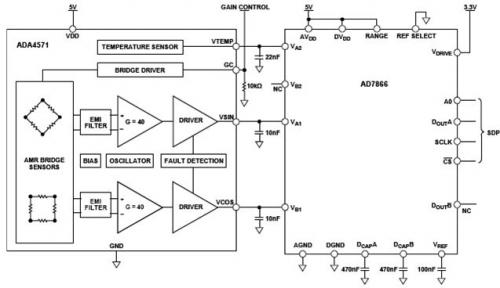
這兩路霍爾信號將通過一個完全差分、帶有經典偏移消除技術的模擬處理鏈進行放大、采樣。調節后的模擬信號再通過ADC(可編程為14bits或15bits)轉換為數字信號,之后這兩個數字信號再通過芯片內部的由DSP實現的反正切函數計算模塊來計算角度,計算公式為:
本文引用地址:http://www.104case.com/article/246893.htm
實際中x V 和y V 還存在式(1)所示的誤差表達式:

MLX90316的偏移誤差、靈敏度誤差和垂直度誤差都會對輸出的角度信息產生較大的影響。雖然芯片內部使用了動態偏移電壓消除機制,并且可以在一定程度上通過芯片內置的DSP 模塊來調整它們之間的正交性,但這些誤差仍會反應在傳感器的輸出信號上。通常由芯片本身所產生的誤差在0.3度以內。
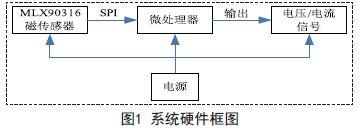
傳感器輸出的表征當前角度值的信號可以以串行數字通信(SPI)方式輸出,也可再通過D/A轉換器變回模擬信號,以PWM模式或模擬量形式輸出。為了滿足設計電路的結構簡單、成本低等要求,這里選擇的是SPI輸出模式,避免了模擬輸入帶來的額外誤差源。
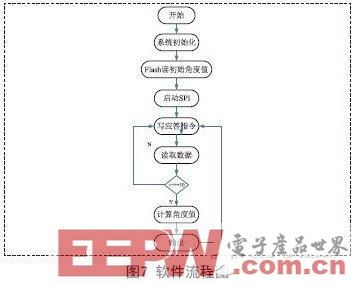
5.系統軟件設計
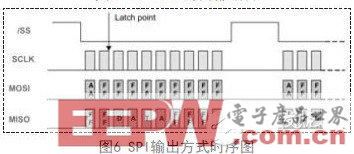
由于MLX90316所獲得的角度信息是以SPI模式輸出的,因此程序設計的關鍵就是SPI通信的實現。SP總線接口是一種同步串行外設接口它是是一種由4根信號線構成的串行接口協議。這4根信號線分別是:時鐘線(SCK)、數據輸入線(MISO)、數據輸出線(MOSI)和從設備使能線(SS)。SPI接口中,MC9S08DZ60作為主控端,MLX90316作為從屬端。SPI通信模塊主要讓 MC9S08DZ606讀MLX90316輸出的數字信號。
SPI的通信過程為:主控端先輸出一個0xAA以及一個0xFF作為通信起始信號,接著輸出8個0xFF,而從端會同時輸出2個0xFF、4個字節的角度信號以及4個0xFF,從而完成一次數據通信。具體的通信時序如圖6所示,軟件流程如圖(7)所示。
6.實驗驗證
基于以上理論分析和實際測量,實測數據如表1所示,角度θ 的誤差在0.5度以內,滿足所要求的技術指標。

7.結論
本文在為實現惡劣環境下角度值的測量的基礎上,介紹了一款基于MLX90316的非接觸式、低成本、高分辨率,高抗干擾的磁性角度傳感器的設計方案。方案利用霍爾傳感器MLX90316所設計的磁性角度傳感器具有非接觸式、高精度、高抗干擾等優點。通過對機械結構和硬件電路的分析,找出誤差來源,在此基礎上編寫軟件算法,實現角度值的測量, 精度能達到0.5°,滿足所要求的技術指標,可廣泛運用于汽車、電機等工業領域中 .

傳感器相關文章:傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器工作原理
風速傳感器相關文章:風速傳感器原理 電流變送器相關文章:電流變送器原理 霍爾傳感器相關文章:霍爾傳感器原理



評論