一種基于STC89C52的客車安全系統設計與實現

摘要 為增加客車的安全性,提出了一種基于STC89C52單片機同時具有防超載和防撞功能的客車安全系統。通過研究超聲波測距原理和脈沖寬度調制原理,并對車身重量和障礙物的距離進行實時監測以實現其功能。對該系統的安全性能和測量精度進行了測試,結果表明,系統達到了設計要求。
本文引用地址:http://www.104case.com/article/246381.htm統計表明,在關于客車的交通事故中,超速和超載是事故發生的主要原因。本設計針對如何預防因超速而產生的車輛撞擊和防超載的發生進行了一次探索。當乘客全部上車后,車門關閉,智能車通過稱重傳感器進行稱重,并將重量顯示在液晶屏上,若重量超過額定數值,蜂鳴器報警、小車無法開動,以實現防超載的功能。小車開動后,超聲波模塊開始測距,當小車與前方障礙物的距離低于規定距離30 cm時,電機減速;當距離減小到安全距離以內15 cm時,小車停駛,直到前方車輛遠離小車才繼續行駛,起到了防撞的作用。本設計具有成本低、操作簡便、體積小等特點。
1 總體設計方案和工作原理
1.1 總體設計方案
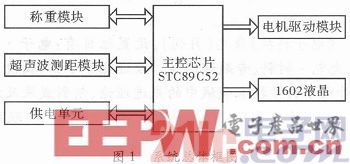
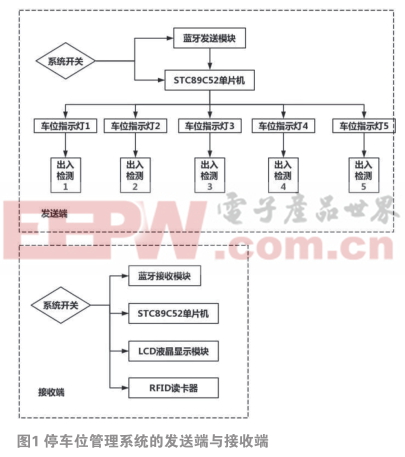
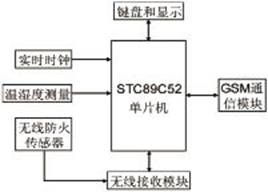
系統組成框圖如圖1所示,智能車以STC89C52作為主控芯片,使用電阻應變式傳感器進行稱重,并將采集到的數據通過模數轉換后發送至單片機同時將結果顯示在液晶屏上。文中使用HC-SR04模塊實現超聲波的收發,并將測得的數據傳輸給單片機,根據小車與障礙物的距離遠近,產生不同的脈沖寬度調制信號以達到實時調節電機轉速的目的,同時由1602液晶顯示距離。
1.2 電機調速原理
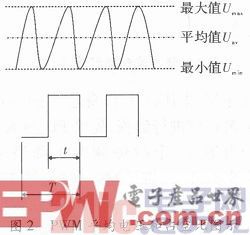
電機轉速的快慢與輸入電壓的大小和通斷有關,因此脈沖寬度調制(PWM)便成為了調節小車行駛速度的最佳方案。脈沖寬度調制,就是按照一定的頻率接通和斷開電源,并根據不同的情況來改變通斷電源的時間。而電機轉速快慢是通過改變電機上的平均電壓實現的,平均電壓值可通過電壓的占空比來改變。如圖2所示,當電源接通時,電機運轉;斷開時,電機停止;通電時間越長,電機轉速越快。所以,根據PWM原理對電機按頻率進行通電和斷電,便可實現對電機速度的精確控制。電機在接通+6 V電壓下能以最快速度運轉,假設在電機持續接通電源,電機的轉速能達到最大,設電機兩端電壓為Umax,而當電源按頻率通斷時,占空比
,T(s)為信號周期,平均電壓為
Uav=Umax×P (1)
故平均速度為
v=kUav (2)
其中,k為系數。在T不變的情況下,改變接通電源的時間t就可改變平均速度。在本設計中,將占空比與電壓看成是近似的線性關系。
經測試和計算,平均速度和平均電壓的關系式為
v=2.78Uav (3)
式中,v的單位為cm/s。
1.3 超聲波測距原理
設計采用超聲波往返時間檢測法,其原理為:在傳播介質為氣體的條件下,從超聲波發射器發出的超聲波經氣體介質的傳播到接收器的時間即往返時間,往返時間與氣體介質中的聲速相乘則是聲波傳輸距離,而所測距離是聲波傳輸距離的1/2,即
式(4)中,L為待測距離;v聲為聲速(約340 m/s);t聲為脈沖波往返的時間。
2 硬件設計
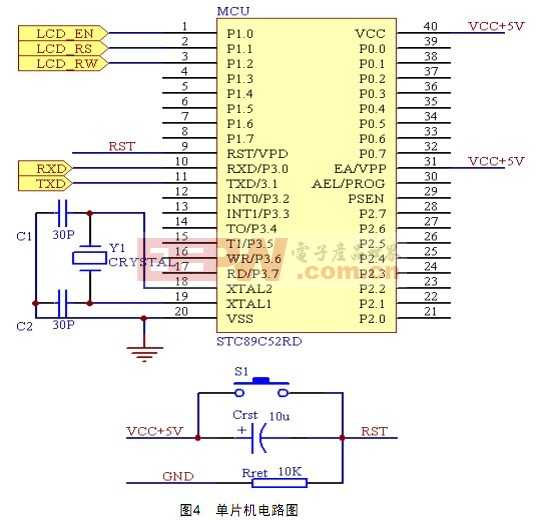
2.1 主控芯片設計
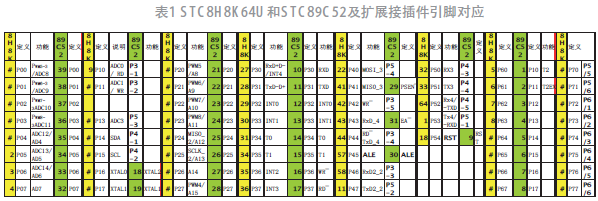
設計中,主控芯片選擇的是STC89C52,因其操作簡便、功能強大、加密性強,同時還具有超強抗干擾性能,工作溫度范圍大,且支持在線系統編程(ISP)。
2.2 測距模塊設計
超聲波選用頻率為40 kHz的矩形脈沖波,因這一頻率的聲波在空氣中的傳播效率最佳。HC-SR04是收發一體式超聲波傳感器,可提供0~200 cm的非接觸式距離遙測功能,其中心頻率為40.0±1.0 kHz。單片機IO口發送一個超過10 mV的高電平信號,模塊則會發送8個連續的40 kHz脈沖波,接收端開始檢測有無返回信號,同時單片機的定時器T1開始計時。當有信號返回時,單片機外中斷INT0被觸發進入公式計算程序,最終得出結果。
2.3 稱重模塊設計
2.3.1 模數轉換模塊
HX711是一款專為高精度稱重傳感器而設計的24位雙通道模數轉換器芯片,具有體積小、操作簡便、抗干擾性強的特點。其含有A、B雙通道供使用者選擇,通道內部與其低噪聲可編程放大器相連。通道A的可編程增益為128或64,通道B增益為32。HX711與51單片機的接口與編程簡單,只需對串口通訊PD_SCK和DOUT進行編程。
PD_SCK應輸入25~27個不等的時鐘脈沖,根據脈沖數的不同選擇不同的通道和增益,本系統軟件選擇A通道128倍增益對數據進行轉換。
2.3.2 電阻應變式稱重傳感器
電阻應變式稱重傳感器的工作原理是將其內部應變片兩端的電壓變化與物體的重量建立線性關系。應變片粘貼在力敏型彈性元件上,當彈性元件受力時,應變片產生相應的形變,應變片自身的電阻也發生變化,由此將機械信號轉換為電信號,而由于受力引起的應變片電阻的變化與電路的電壓變化成正比,只需測出輸出電壓的數值,再經過公式換算即可得到所測量物體的重量。
2.4 電路驅動模塊的設計
L298N是雙H橋直流電機驅動芯片,其可通過單片機的IO口直接提供信號,且輸入輸出的電壓范圍大,支持5~35 V的直流電壓輸入,能經IN1、IN2、IN3、IN4和ENA、ENB輸出3~15 V的電壓,保證了直流電機的穩定運轉。在控制方面,單片機IO口對INX輸入不同的高低電平可實現電機的正反轉和停止的功能,IO口輸入電平與電機運行狀態如表1所示;利用單片機IO口產生的不同占空比PWM信號輸入ENA、ENB兩個端口則可實現電機加速、減速的功能。

模數轉換器相關文章:模數轉換器工作原理
稱重傳感器相關文章:稱重傳感器原理 蜂鳴器相關文章:蜂鳴器原理 脈沖點火器相關文章:脈沖點火器原理

評論