使用基于模型的設計 開發側翻穩定性控制系統

· 車輛滑移角限制為 +/-11.5 度。
· 最大滑移率設置為 +/-37.25 度/秒。
· Fishhook 操控實驗結束時的最低車速設置為 10 英里/小時。
· 仿真結束的時間設置為 10 秒。
為避免因一組不正確的控制器增益值而導致的車輛側翻仿真提早結束,需要指定仿真時間限制。
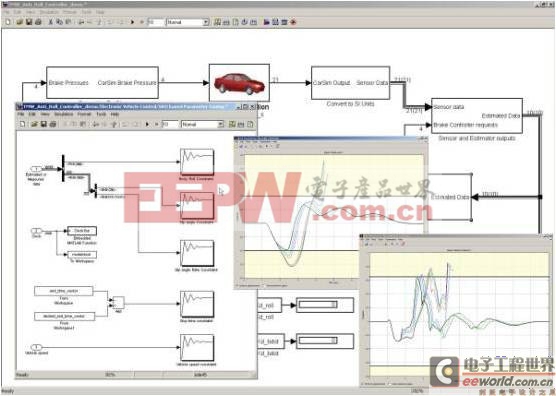
圖 2:提供給 Signal Constraint 模塊的信號(左側)以及優化過程中側翻與滑移率信號的變化(右側)。黃色區域代表不允許的信號值范圍。
每項信號限制都定義了信號的分段線性上限和下限。在優化過程中,控制器增益將被調整,仿真在迭代循環中重復運行,直至仿真信號滿足指定邊界或優化例程無法解決問題。圖 2 顯示出在優化算法迭代得到解決方案的過程中側翻信號和滑移率信號的變化。在解決此類可行性問題時,優化算法將計算被限制的信號與各分段線性邊界之間的最大有符號距離。通常情況下,負數值表示相應的限制已滿足。









評論