dsPIC3F3013的CAN總線數(shù)據(jù)采集系統(tǒng)

CAN總線接口電路如圖3所示。

CAN協(xié)議控制器采用Microchip公司生產(chǎn)的MCP2515。MCP2515是帶有SPI接口的獨(dú)立CAN控制器,它完全支持CAN V2.0B技術(shù)規(guī)范,通信速率為1 Mb/s,包括2個(gè)接收緩沖器、6個(gè)29位驗(yàn)收濾波寄存器、2個(gè)29位驗(yàn)收屏蔽寄存器、3個(gè)具有優(yōu)先級(jí)設(shè)定及發(fā)送中止的發(fā)送緩沖器、高速SPI接口(10 MHz)。
MCP2515與MCU的接口可以靈活配置。可通過(guò)引腳(如TXORTS)與MCU的數(shù)字I/O腳直接相連,利用數(shù)字I/O的讀寫功能控制MCP2515 的狀態(tài);也可以直接使用MCP2515的SPI指令集來(lái)實(shí)現(xiàn)所有的功能。用于控制MCP2515的SPI指令集如表1所列。

dsPIC30F3013通過(guò)SPI接口與MCP2515進(jìn)行通信,dsPIC30F3013的SPI模塊工作在主控模式,MCP2515工作在從動(dòng)模式。dsPIC30F3013通過(guò)調(diào)用SPI指令來(lái)訪問(wèn)MCP2515的內(nèi)部寄存器。
MCP2551是一個(gè)可容錯(cuò)的高速CAN收發(fā)器,它完全符合ISO-11898標(biāo)準(zhǔn),包括能滿足24 V電壓要求。它的工作速率可高達(dá)1 Mb/s。
2 軟件設(shè)計(jì)
dsPIC30F3013作為控制核心,它承擔(dān)著數(shù)據(jù)采集處理和CAN通信的任務(wù)。數(shù)據(jù)采集部分的工作流程如圖4所示。
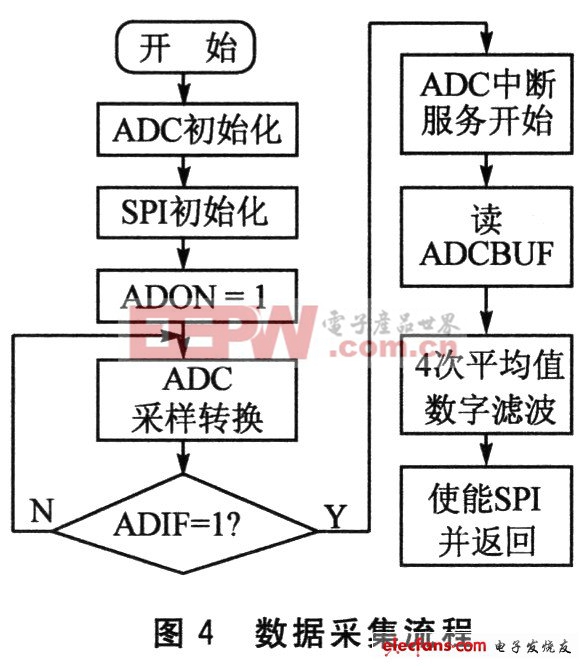
dsPIC30F3013的12位ADC模塊包含一塊ADCBUFO至ADCBUFF的16字雙口只讀緩沖區(qū),對(duì)ADC轉(zhuǎn)換結(jié)果進(jìn)行緩沖。本應(yīng)用采樣3路信號(hào),并用掃描輸入,經(jīng)過(guò)12次ADC轉(zhuǎn)換后,每次轉(zhuǎn)換的數(shù)據(jù)依次寫入ADCBUF0至ADCBUFB。即代號(hào)為0、3、6、9的AD-CBUF中存放的是同一個(gè)信號(hào)的不同時(shí)間的采樣值,將這4個(gè)緩沖器的結(jié)果相加,然后再右移2位,即可實(shí)現(xiàn)該信號(hào)的4次平均值數(shù)字濾波。其他兩個(gè)信號(hào)存放在與之相關(guān)的 ADCBUF中,處理方法與此相同。
MCP2515的SPI接口支持0,0和1,1運(yùn)行模式。外部數(shù)據(jù)和命令通過(guò)SI引腳傳送到器件中,且數(shù)據(jù)在SCK時(shí)鐘信號(hào)的上升沿傳送進(jìn)去,在SCK的下降沿通過(guò)SO引腳傳送出去。CS片選引腳設(shè)置為低電平后,MCP2515希望收到的第一個(gè)字節(jié)是指令/命令字節(jié),這就要求在調(diào)用一個(gè)命令時(shí),要先把CS 引腳拉升為高電平然后再降低為低電平。使用裝載TX緩沖器指令,取消了一般寫命令所需的8位地址,只需選擇地址指針設(shè)置的6個(gè)地址之一,便可快速地將數(shù)據(jù)寫入發(fā)送緩沖器。
下面以MCP2515的裝載TX緩沖器為例來(lái)說(shuō)明數(shù)據(jù)的發(fā)送過(guò)程。裝載TX緩沖器的時(shí)序如圖5所示。本應(yīng)用有3路信號(hào),每一路信號(hào)都要求精確到小數(shù)點(diǎn)后2 位,所以經(jīng)過(guò)處理后的數(shù)據(jù)格式使用浮點(diǎn)型。一個(gè)浮點(diǎn)數(shù)需要占用4字節(jié),為了使監(jiān)控中心易于管理,用包含4字節(jié)數(shù)據(jù)長(zhǎng)度的標(biāo)準(zhǔn)數(shù)據(jù)幀來(lái)發(fā)送數(shù)據(jù)。現(xiàn)以裝載 TX緩沖器0為例說(shuō)明一次數(shù)據(jù)發(fā)送操作,如圖6所示。

dsPIC30F3013的SPI模塊在數(shù)據(jù)發(fā)送和接收時(shí)有8位和16位兩種工作模式可選。MCP2515的SPI指令、內(nèi)部寄存器地址及數(shù)據(jù)都是8位的,所以在初始化SPI模塊時(shí),清零MODE16(SPI1CON10>),將通信數(shù)據(jù)配置為8位寬度。
結(jié) 語(yǔ)
本文介紹了一種以Microchip公司dsPIC30F3013為控制核心,以MCP2515為CAN控制器和以MCP2551作為CAN收發(fā)器的數(shù)據(jù)采集系統(tǒng)。該系統(tǒng)與傳感器組成一個(gè)CAN節(jié)點(diǎn),有效地改善了工控系統(tǒng)中監(jiān)控部分線路布局范圍廣、布線凌亂、抗干擾能力差的現(xiàn)狀,同時(shí),使整個(gè)監(jiān)控系統(tǒng)更易于擴(kuò)展。實(shí)踐證明,這種設(shè)計(jì)是可靠的、高性能的。











評(píng)論