DSP56F807在交流隨動系統中的應用

●軟件限位就是通過軟件的分析計算,控制系統運動位置不超過設定的位置,它是限位里最低級的一種。
●電氣限位就是當系統發生故障,軟件限位沒有起到限位作用時,系統超過軟件限定的位置而繼續運動,在到達電氣限定位置時,使限位微動開關斷開,通過電路控制使制動器處于抱緊狀態,控制電機停止轉動,從而實現限位的功能。
●機械限位是通過機械結構的設計,對系統進行位置的限制。這是一種最基本也是最原始的限位方法,是系統限位的最后一道關卡。當軟件限位和電氣限位均未產生作用時,必須通過機械限位(硬碰撞)使系統停止在某一位置,保證系統的安全性。
3.2.2 電氣限位和制動的實現
圖3所示為電氣限位、鎖定電原理圖:
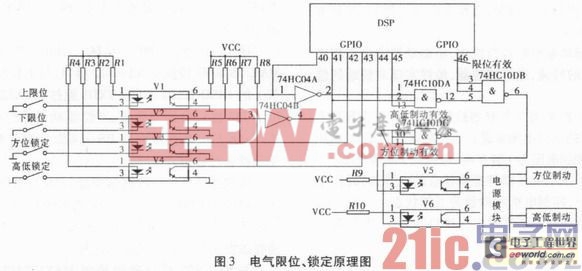
開機初始化過程中,首先通過DSP的I/O口,檢測鎖定開關是否處于閉合狀態。如果鎖定開關閉合(即鎖定器處于鎖定狀態),DSP送出方位制動命令1、高低制動控制命令0和限位控制命令1,與非門輸出為0,控制光電耦合管處于導通狀態,光電耦合管的輸出作為可控+24 V電源模塊的控制端,使電源不輸出+24 V電壓,控制電機制動器處于制動狀態。軟件將檢測到鎖定開關狀態上傳,提醒操作手解脫鎖定裝置。
如果鎖定開關處于斷開狀態時,DSP送出方位制動命令0、高低制動命令1,檢測上下限位(是指高低方向的限位,開關斷開為限位,閉合為非限位)開關是否處于閉合狀態。假設限位開關處于閉合狀態,DSP檢測到后,送出限位控制命令0,與非門輸出為1,光電耦合管不導通,電源模塊輸出+24 V,使高低電機制動器處于非制動狀態,由DSP程序控制電機轉動,系統處于正常工作狀態。在正常工作時,DSP送出限位控制命令為1、方位制動命令為0、高低制動命令為1,使光電耦合管V5的導通與否受限位開關的控制,當上、下限位開關處于閉合狀態時,光電耦合管非導通,電源模塊輸出+24 V,使電機制動器處于非制動狀態;只要上、下限位開關其中之一處于斷開狀態,光電耦合管導通,電源模塊輸出為0 V,電機制動器處于制動狀態,從而保護整個系統的安全。
4 結束語
串口電路通信功能正常,鎖定、限位控制電路穩定有效,整套電路已成功應用于某型武器系統中。實踐證明,作為電機控制的專用芯片DSP56F807具有以下優勢:較高的運算速度能夠滿足電機高性能的控制算法;較大的片內存儲空間(基本不需要外擴存儲器)降低了用戶成本并且提高了程序安全性;高度集成的片內外設增加了電機控制系統的集成度使系統的可靠性大大提高;良好的軟件開發環境,提供了大量的專用函數庫,大大縮短了產品開發周期。

評論