狀態機在嵌入式前后臺軟件系統中的應用

在嵌入式前后臺系統中,外部的異步事件通過中斷來捕獲并運行在后臺,而其他的任務則運行于前臺。提高系統中的任務處理能力,是嵌入式前后臺系統設計的重點。本文描述了利用狀態機來提高嵌入式前后臺系統任務處理能力的實現方法。為了便于研究和描述狀態機在嵌入式前后臺軟件系統中的應用,本文將以移動2G光纖直放站近端機的監控軟件案例來闡述和說明。
1 移動2G光纖直放站近端機監控單元
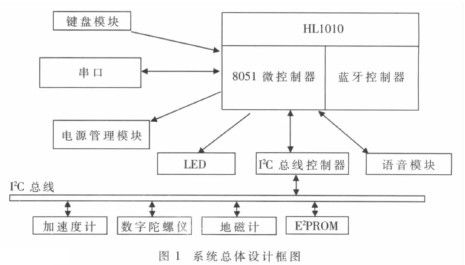
對于移動2G光纖直放站近端機監控單元,只介紹與本文有關部分的原理框圖,如圖1所示。圖中GSMModem通過AT91SAM7S256的串口1相連。由于GSMModem的特性和短消息的收發,其通信收發處理相對比較繁瑣和復雜。例如,發送短消息時,需要向Modem發送“AT+CMGS=電話號碼”并等待一定的時間,再發送短消息內容,等待發送成功。短消息發送成功后,GSM Modem將回應“+CMGS序號”的信息。其發送需要等待的時間長短不定。
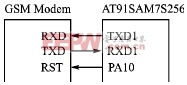
圖1 直放站近端機監控單元
在移動2G光纖直放站近端機中,通過串口1發送到GSMModem的數據不僅僅是短消息,還包括下行功率查詢、信源信息查詢、讀取/刪除短消息等。因此,針對移動2G光纖直放站近端機監控單元的要求和軟件系統為前后臺系統的特點,移動2G光纖直放站近端機監控單元的監控軟件設計采用了狀態機和隊列的方式。
2 軟件的設計思路
根據前后臺軟件系統的特點,結合移動2G光纖直放站近端機的硬件結構,以移動2G光纖直放站近端機的監控軟件中的短消息收發子系統為例,來闡述軟件的設計思路。GSMModem的短消息接收采用軟件主動讀取的方式,即軟件以中斷方式接收到短消息在Modem中存儲的序號,然后軟件主動讀取短消息和刪除已讀取的短消息。短消息的收發處理流程如圖2所示。
2.1 短消息的接收
如圖2所示,GSMModem主動上報的信息將存儲到串口1接收緩沖區中,軟件從串口1接收緩沖區的數據中解析出短信序號(Modem收到的短消息在Modem中的存儲序號)存儲到短信序號隊列(短信序號緩沖區1~n)中,然后軟件通過短信序號隊列的狀態來決定是否需要向Modem發送讀取短信或者刪除短信命令。
當軟件發送讀短消息命令后,GSMModem將對應序號的短信息送出,數據將存儲到串口1接收緩沖區中,軟件再從串口1接收緩沖區的數據中解析出短消存儲到短信隊列(短信緩沖區1~m)中。這樣需要軟件處理的短消息就存儲到了短信隊列中,而處理的事情則交由軟件的其他區處理。
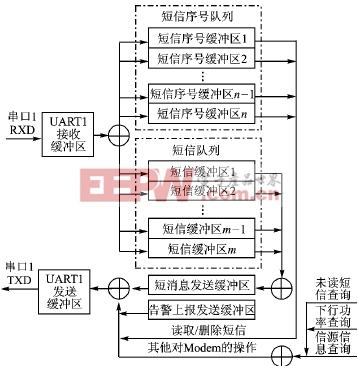
圖2 直放站短信收發處理流程
2.2 短消息的發送
對所有需要發送到GSMModem的數據,則通過UART1發送緩沖區來完成。具體發送哪些數據(讀取/刪除短信、下行功率查詢、信源信息查詢、未讀短信查詢)或者緩沖區的數據(短消息發送緩沖區、告警上報發送緩沖區)由軟件根據相應的狀態來選擇確定。
3 設計思路的實現
3.1 串口1數據的發送
3.1.1 串口1發送緩沖區的數據結構
串口1是否有數據需要發送,由串口1的發送緩沖區的狀態來決定。串口1發送緩沖區的數據結構定義如下:
typedef struct{
unsigned char bStBuf;//bStBuf =
Uart1_TxBuf_Rdy或者=Uart1_TxBuf_Wait或者=Uart1_TxBuf_Empty
unsigned short Index;
unsigned short Len;
char Buf[270];
}Uart1Buf_t;
① bStBuf成員: 串口1發送緩沖區的狀態。
② Index成員: 串口1發送數據緩沖區索引。
③ Len成員: 串口1發送數據緩沖區中有效數據的長度。
④ Buf成員: 串口1發送數據緩沖區。
3.1.2 串口1發送緩沖區軟件定時器
由于GSM Modem的特性致使串口1不能不間斷地發送數據,因此,對串口1的數據發送設定一個軟件定時器。軟件定時器用于控制GSMModem是否可以接收來自串口1的新數據。軟件定時器的結構定義如下:
typedef struct{
unsigned char bTimerSt;//軟件定時器的狀態: Timer_START或Timer_STOP
unsigned int TimerCtn;//軟件定時器的計數器
void (*func)(void);//超時后相應的處理功能函數指針
}SoftTimer_t;
① bTimerSt成員: 用于描述軟件定時器的狀態。它有2種狀態:
◆ Timer_START——開始軟件定時器;
◆ Timer_STOP——停止軟件定時器。
② TimerCtn成員: 用于描述軟件定時器的定時時間。它是一個32位的計數器,硬件定時的基準時間為20ms(建議設置在前后臺系統主程序循環1次需要的時間),因此最大定時時間為20 ms×232=85 899 345.92 s。
③ func成員:用于描述軟件定時器超時需要去處理相應事情的函數。該函數是在定時器中斷服務程序下運行的,因此為了減少中斷服務程序占用CPU的時間,函數只作簡單的狀態設置或者清除工作,如函數Clear_Uart1TxbStBuf。
void Clear_Uart1TxbStBuf(void){
Uart1Tx.bStBuf = Uart1_TxBuf_Empty;//設置串口1發送緩沖區為空
……
}
3.1.3 串口1數據發送狀態機
串口1發送緩沖區的成員bStBuf有3種狀態。
① Uart1_TxBuf_Rdy: 串口1發送緩沖區數據準備好。
② Uart1_TxBuf_Wait: 串口1發送緩沖區數據等待。
③ Uart1_TxBuf_Empty: 串口1發送緩沖區空。
3種狀態的轉移情況如圖3所示。
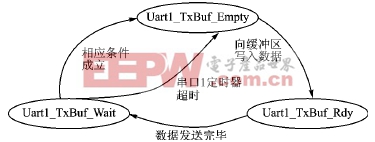
圖3 串口1的發送緩沖區狀態機
當串口1發送緩沖區在Uart1_TxBuf_Rdy狀態下時,軟件可以向串口的發送緩沖區中寫入數據。寫入數據后,串口1發送緩沖區的狀態將轉移到Uart1_TxBuf_Rdy。
在將需要發送的數據拷貝到串口1發送緩沖區后,開啟串口1的發送中斷,軟件將進入串口1的發送中斷服務程序。這個中斷服務程序將檢測串口1發送緩沖區的狀態。如果狀態為Uart1_TxBuf_Rdy,則說明串口1發送緩沖區中有數據需要發送,這時串口1緩沖區的數據通過串口1的發送中斷把所有的數據發送給GSMModem。當數據發送完畢后,串口1發送緩沖區的狀態將轉移到Uart1_TxBuf_Wait狀態,否則,將維持當前的狀態。
當串口1發送緩沖區的狀態在Uart1_TxBuf_Wait狀態時,它可以有兩條路徑讓串口1發送緩沖區的狀態轉移到Uart1_TxBuf_Empty:
其一是串口1軟件定時器超時。
其二是相應的條件成立。如發送端消息,當軟件從串口1的接收緩沖區中解析出“+CMGSn(1≤n≤255)”信息或者發送失敗的信息時,串口1發送緩沖區的狀態將轉移到Uart1_TxBuf_Empty狀態,同時停止串口1軟件定時器;讀短消息收到“+CMGR……”信息。
3.2 短信數據的發送
如圖2所示,需要通過串口1發送的數據包括:
讀取/刪除短信數據、下行功率查詢數據、信源信息查詢數據、未讀短信查詢數據、短消息發送緩沖區數據、告警上報發送緩沖區數據。其中,讀取/刪除短信數據、下行功率查詢數據、信源信息查詢數據和未讀短信查詢數據,直接由GSM Modem處理,并作出處理結果應答。因此,這類數據直接通過串口1發送緩沖區發送。
而短信數據(短消息發送緩沖區數據、告警上報發送緩沖區數據)發送需要兩步操作:
先發送短信的目的電話號碼,再發送短信消息內容。發送是否完成,與GSMModem和GSM網絡有關。因此,這類數據的發送,先將發送操作的所有數據存儲到短信數據緩沖區中,然后由軟件通過短信數據緩沖區的狀態,將數據通過串口1發送緩沖區發送給GSMModem。
3.2.1 短信數據結構
短信數據包括短消息發送緩沖區數據和告警上報發送緩沖區數據。根據短信發送操作的兩個步驟,短信數據緩沖區的數據結構定義如下:
typedef struct{
unsigned char bStBuf;//bStBuf = SmsTx_Emty或者= SmsTx_CmdRdy或者
= SmsTx_Dly1或者= SmsTx_DatRdy或者= SmsTx_Dly2或者= SmsTx _Wait
unsigned char cmd_len;
char cmd_buf[32];
unsigned short dat_len;
char dat_buf[SMS_LEN+1];
unsigned char retry_time;//重傳次數
}SmsTx_t;
① bStBuf成員: 用于描述短信數據緩沖區的狀態。
② cmd_len成員: 用于描述cmd_buf中數據的長度。
③ cmd_buf成員: 用于存儲短消息發送中的控制命令,如AT+CMGS=13583823789。
④ dat_len成員: 用于描述存儲短消息發送中的信息體長度。
⑤ dat_buf成員: 用于存儲短消息發送中的信息體。
⑥ retry_time成員: 用于描述短消息在發送失敗時,重傳的次數。
3.2.2 短信數據發送狀態機
短信數據緩沖區的狀態有6種:
① SmsTx_Empty: 短信數據緩沖區空。
② SmsTx_CmdRdy: 短信數據緩沖區控制命令準備好。
③ SmsTx_Dly1: 短信數據緩沖區延時1。
④ SmsTx_DatRdy: 短信數據緩沖區消息體準備好。
⑤ SmsTx_Dly2: 短信數據緩沖區延時2。
⑥ SmsTx_Wait: 短信數據緩沖區等待。
其狀態的轉移情況如圖4所示。
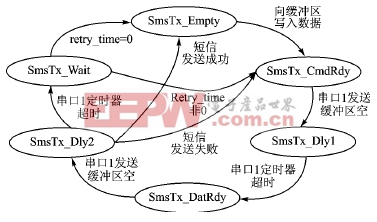
圖4 短信數據發送狀態機
狀態機的轉移過程通過短消息發送緩沖區數據的發送來說明,其告警上報發送緩沖區的數據發送與此相同。
結語
在整個移動2G光纖直放站近端機的監控軟件中,除了短消息收發處理,還包括實時采樣、實時告警上報等任務。其所有的軟件設計都采用類似于短信收發處理的狀態機、隊列和軟件定時器的設計思路,極大地提高移動2G光纖直放站近端機監控軟件的效率。這種在前后臺系統中使用狀態機、隊列和軟件定時器的設計思路,可以應用到其他的嵌入式前后臺系統中,是一種值得學習、借鑒的嵌入式軟件設計思路。




評論