磁導(dǎo)航智能車路徑信息采集系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)

磁導(dǎo)航技術(shù)在智能交通領(lǐng)域中是一項(xiàng)非常有前景的技術(shù),以國家智能交通系統(tǒng)工程技術(shù)研究中心(ITSC)的研究成果為例,其采用磁性參考/感知原理,即以車道中心線上布設(shè)的離散磁道釘為車道參考標(biāo)記,通過車載磁傳感器探測到磁信號(hào)而產(chǎn)生感應(yīng)電壓,來判斷車輛當(dāng)前的位置情況。這是采用永磁體作為參照物的實(shí)例[1-2]。
鑒于磁導(dǎo)航技術(shù)具有的實(shí)用價(jià)值,飛思卡爾杯全國大學(xué)生智能汽車競賽在原有的光電組與攝像頭組的比賽項(xiàng)目上,于2010年新增了通過感應(yīng)賽道中心導(dǎo)線產(chǎn)生的交變磁場進(jìn)行路徑檢測的電磁組。
根據(jù)電磁組的路徑信息采集原理,可以得出磁場傳感器的基本設(shè)計(jì)方法和路徑信息提取算法的基本要求。對于電磁組賽車,交變磁場分布范圍廣泛,傳感器得到的數(shù)據(jù)是一系列有分布規(guī)律的離散點(diǎn)。可以根據(jù)離散點(diǎn)的輪廓、實(shí)際經(jīng)驗(yàn)和誤差要求選擇一條曲線來近似逼近磁場在傳感器處的分布情況。另外根據(jù)競賽規(guī)則,處理器必須采用飛思卡爾公司的HCS12系列單片機(jī),由于其數(shù)據(jù)處理能力不足,必須選用一種數(shù)據(jù)處理量較小的算法來實(shí)現(xiàn)離散點(diǎn)的曲線擬合,以保證控制的實(shí)時(shí)性。
以設(shè)計(jì)合理的路徑信息采集系統(tǒng)來對車體位置進(jìn)行準(zhǔn)確判斷,同時(shí)選用一種路徑信息采集算法從傳感器信號(hào)中準(zhǔn)確提取出賽道信息是本文研究的重點(diǎn)。
1 磁導(dǎo)航智能車系統(tǒng)
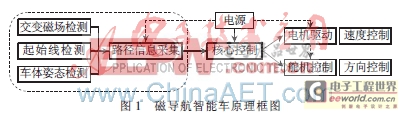
磁導(dǎo)航智能車通過感應(yīng)外界電磁環(huán)境對路徑信息進(jìn)行準(zhǔn)確判斷,從而通過舵機(jī)和電機(jī)對車體方向和速度進(jìn)行控制,達(dá)到自主尋跡的目的。系統(tǒng)主要分為核心控制模塊、路徑信息采集模塊、電機(jī)驅(qū)動(dòng)模塊和電源模塊,其原理框圖如圖1所示。
本系統(tǒng)的磁場環(huán)境為埋設(shè)在跑道中通用的20 kHz、100 mA交變電流的導(dǎo)線產(chǎn)生的交變磁場。利用交變磁場進(jìn)行磁導(dǎo)航的技術(shù)在國內(nèi)應(yīng)用的實(shí)例較少,其中清華大學(xué)根據(jù)競賽規(guī)則設(shè)計(jì)了一種電磁組賽車,該賽車使用兩個(gè)傳感器采集車體兩邊的磁場信號(hào),以控制小車的走向。該設(shè)計(jì)方案是用運(yùn)放、三極管等一些基本電子元件對車體進(jìn)行粗略控制。如果采用更多的傳感器、更精確的信號(hào)處理方法和單片機(jī),再配合一定的算法則可以對道路的形狀進(jìn)行準(zhǔn)確判斷、優(yōu)化控制策略和改善控制效果。
2 路徑信息采集系統(tǒng)的硬件設(shè)計(jì)
路徑信息采集系統(tǒng)通過對路徑的檢測來獲取路徑信息,從而對車體的方向和速度進(jìn)行精確控制。該系統(tǒng)主要包括交變磁場檢測、起始線檢測和車體姿態(tài)檢測三個(gè)部分,其原理如圖1中虛線框所示。
2.1 交變磁場檢測
交變磁場檢測主要是對特定的交變磁場環(huán)境進(jìn)行檢測。本文選用LC選頻振蕩電路檢測交變磁場,然后通過放大電路的放大和檢波電路的檢波處理,得到與振蕩信號(hào)峰峰值成正比的直流電平,以便于A/D轉(zhuǎn)換。其原理框圖如圖2所示。

(1)選頻部分
采用LC振蕩電路的原理進(jìn)行設(shè)計(jì)。根據(jù)LC振蕩電路諧振頻率計(jì)算公式和市場上電感電容型號(hào),選用一定量值的電感和電容。電感選型時(shí)要注意其Q值和內(nèi)阻,Q值會(huì)影響其諧振增益和交變磁場的檢測。
(2)放大部分
信號(hào)的放大有多種方法:基本放大電路、帶電壓偏置的放大電路、運(yùn)算放大電路等。對于基本放大電路信號(hào),其靜態(tài)工作點(diǎn)易受溫度變化的影響,輸出信號(hào)可能會(huì)出現(xiàn)失真[5]。這就需要帶電壓偏置的放大電路,偏置電路給三極管提供合適的工作點(diǎn),保證三極管在放大交流信號(hào)時(shí)工作在放大區(qū),同時(shí)能夠保證靜態(tài)工作點(diǎn)的穩(wěn)定,使工作點(diǎn)少受或基本上不受環(huán)境溫度的影響。但是由于帶電壓偏置的放大電路的三極管靜態(tài)工作點(diǎn)的調(diào)節(jié)較為繁瑣,且在多路信號(hào)需放大的情況下電路設(shè)計(jì)較為復(fù)雜。因此,從對信號(hào)進(jìn)行精確放大的角度考慮,本文選用儀表用差動(dòng)放大電路對信號(hào)進(jìn)行放大處理。其電路原理圖如圖3所示。

該放大電路輸出電壓與輸入電壓的關(guān)系如下:
采用這種由三運(yùn)放組成的儀表用差動(dòng)放大電路可以提高輸入電阻,提高共模抑制比,運(yùn)放U1A、U2A性能相近,簡化了溫度補(bǔ)償電路。該放大電路具有低失調(diào)電壓、低漂移、低輸入偏置電流、高共模抑制比等特點(diǎn)[6]。
(3)檢波部分
檢波部分選用倍壓整流檢波電路的設(shè)計(jì)方案。該電路可以獲得正比于交流電壓信號(hào)峰峰值的直流信號(hào),便于A/D轉(zhuǎn)換。
2.2 起始線檢測
根據(jù)競賽規(guī)則,起始線處放置永磁體作為標(biāo)志。起始線檢測即是對永磁體檢測。本文采用霍爾元件方案,當(dāng)垂直方向上穿過霍爾元件的磁場強(qiáng)度方向改變時(shí),霍爾元件的輸出端將產(chǎn)生電平跳變,通過檢測該電平跳變來檢測起始線。
2.3 車體姿態(tài)檢測
對于車體姿態(tài)檢測,本文采用Freescale公司量程為±1.5 g的低重力加速度傳感器MMA7361L,用于測量車體相對于水平面的傾斜程度。
MMA7361L是一款低功耗、低重力三軸加速度傳感器,具有信號(hào)調(diào)理、穩(wěn)定補(bǔ)償?shù)裙δ躘7]。將其固定在車身上可以實(shí)時(shí)檢測車體相對于地面的傾斜角度,主要用在車輛上坡和下坡的判斷。[next]
本設(shè)計(jì)將7個(gè)傳感器水平并排放置,距地面高度約為5 cm。假設(shè)線圈在水平方向上與導(dǎo)線距離為r,線圈高度為h,如圖4所示。
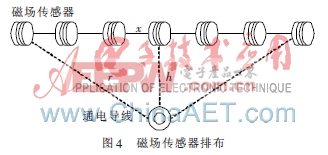
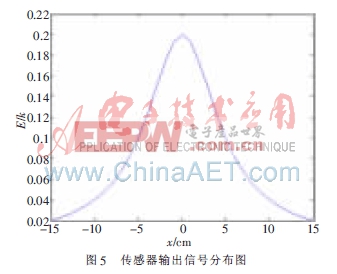
根據(jù)安培環(huán)路定理,距導(dǎo)線r處的磁感應(yīng)強(qiáng)度反比于距離r。而線圈的軸線是水平的,感應(yīng)電動(dòng)勢反映了磁場的水平分量,因此感應(yīng)電動(dòng)勢: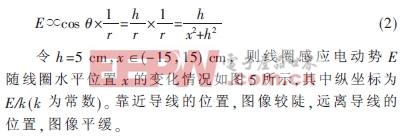
路徑信息的采集首先要確保傳感器輸出信號(hào)的準(zhǔn)確性,準(zhǔn)確性的確保應(yīng)從相同條件下各個(gè)傳感器輸出信號(hào)的數(shù)值差異和信號(hào)數(shù)值分布兩個(gè)方面來判斷。本文在軟件上主要采用歸一化算法和曲線擬合算法來確保路徑信息采集的準(zhǔn)確性。
3.1 歸一化算法
該算法是將所有傳感器輸出信號(hào)變換為無量綱的量,屏蔽各傳感器在硬件和物理特性上的差異。具體算法流程是:首先測量每個(gè)傳感器輸出信號(hào)的最大值(Max1、Max2、Max3、Max4、Max5、Max6、Max7)作為基準(zhǔn)量,在賽車運(yùn)行過程中,將7個(gè)傳感器采集到的數(shù)據(jù)分別除以7個(gè)基準(zhǔn)量,即可得到傳感器歸一化后的數(shù)值,該數(shù)值可用于賽道類型判斷。
3.2 曲線擬合算法
從控制的需要,只需提取出導(dǎo)線所處的位置,也就是圖像中峰值點(diǎn)的橫坐標(biāo)。因此只要擬合出一條曲線,使該曲線峰值點(diǎn)橫坐標(biāo)盡可能地逼近導(dǎo)線所處位置的橫坐標(biāo)即可。本文采用最小二乘法進(jìn)行曲線擬合。
取7組數(shù)據(jù)中最大的前5組數(shù)據(jù)進(jìn)行二次曲線擬合,得到二次曲線方程為: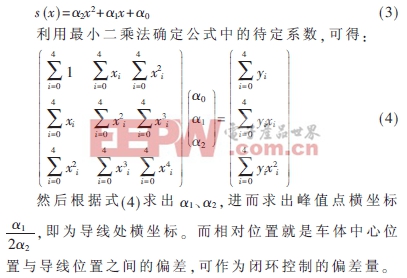
采用最小二乘法對數(shù)據(jù)進(jìn)行二次曲線擬合有如下優(yōu)點(diǎn):
(1)可以滿足智能車控制的實(shí)時(shí)性需要。進(jìn)行二次曲線擬合的計(jì)算量相比于其他曲線擬合方法較小,同時(shí)二次曲線擬合的公式可以事先求得,大大減少了運(yùn)算量。
(2)對導(dǎo)線位置判斷較為準(zhǔn)確。雖然傳感器信號(hào)的實(shí)際分布情況不是二次函數(shù)的形式,但是通過二次曲線擬合后得到的峰值點(diǎn)橫坐標(biāo)與實(shí)際峰值點(diǎn)橫坐標(biāo)接近。因此通過該算法可準(zhǔn)確地提取出導(dǎo)線的位置。
4 路徑信息采集系統(tǒng)的測試結(jié)果與分析
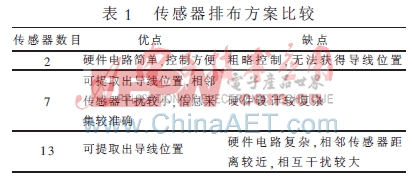
本文采用如圖4所示的7個(gè)傳感器一字型排列的方案,測試過程中同時(shí)對2個(gè)傳感器和13個(gè)傳感器一字排布的方案進(jìn)行了測試,并對三種排布方案進(jìn)行了優(yōu)缺點(diǎn)的分析,其結(jié)果如表1所示。綜合考慮后,選用7個(gè)傳感器的方案最合適。[next]
小車運(yùn)行過程中,使用基于NRF24L01的無線模塊和基于LabVIEW的上位機(jī)對設(shè)計(jì)方案進(jìn)行在線調(diào)試。首先根據(jù)歸一化算法,測得各傳感器輸出信號(hào)的最大值,即各傳感器放置在導(dǎo)線正上方一定高度時(shí)的輸出量作為基準(zhǔn)量,各傳感器的輸出信號(hào)除以基準(zhǔn)量作為歸一化后的數(shù)據(jù)進(jìn)行曲線擬合。為方便運(yùn)算,本文將歸一化后的數(shù)據(jù)乘以126作為最終數(shù)據(jù)。表2為賽車運(yùn)行到某一彎道處時(shí),各傳感器輸出量與歸一化后的數(shù)據(jù)量之間的關(guān)系,同時(shí)設(shè)定各個(gè)傳感器的橫坐標(biāo)。通過上位機(jī)觀測到的各傳感器輸出量如圖6所示,各傳感器輸出量歸一化后的數(shù)據(jù)量如圖7所示。利用最小二乘法求得峰值點(diǎn)坐標(biāo)值為1.516(保留小數(shù)點(diǎn)后三位小數(shù))。
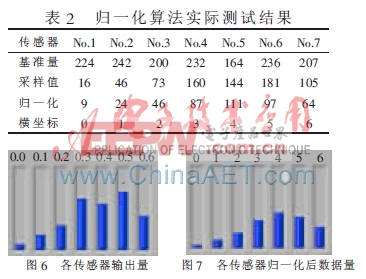
未處理之前,各傳感器分布并無一定規(guī)律,而歸一化處理后,各傳感器數(shù)據(jù)按一定規(guī)律分布。曲線擬合算法可以準(zhǔn)確提取出峰值點(diǎn)橫坐標(biāo),這樣智能車方向閉環(huán)控制中的位置反饋由一系列離散量變成連續(xù)量,反饋信息更加精確。
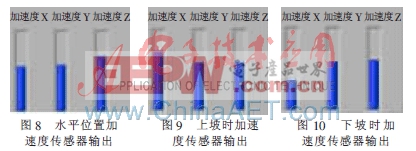
對于車體姿態(tài)的檢測,車體在水平位置、上坡和下坡時(shí)加速度傳感器輸出信號(hào)分別如圖8、圖9、圖10所示。根據(jù)本文中加速度傳感器的放置位置,車體的前后傾斜程度影響傳感器X方向的輸出量,因此檢測加速度傳感器X方向上的輸出量變化即可判斷車體當(dāng)前傾斜程度,進(jìn)而改變控制策略。
本文介紹了磁導(dǎo)航智能車路徑信息采集系統(tǒng)的設(shè)計(jì)方案,從硬件和軟件的角度對設(shè)計(jì)過程進(jìn)行了較為詳細(xì)的闡述。硬件上,采用儀表用差動(dòng)放大電路對采集到的較弱的信號(hào)進(jìn)行精確放大處理,采用加速度傳感器對車體姿態(tài)做出判斷;軟件上,采用歸一化算法和曲線擬合算法對傳感器采集到的信號(hào)進(jìn)行進(jìn)一步處理,從而提取出車體當(dāng)前的準(zhǔn)確位置。測試結(jié)果證明,本方案是可行有效的。但該設(shè)計(jì)方案還有一些可以改進(jìn)之處,例如在對傳感器布局時(shí),可以將電感線圈按照兩兩垂直的方向排列,這樣可以分別求得某一點(diǎn)處三個(gè)方向上的磁場分量;在軟件的算法上也可以引入對賽道類型的預(yù)判策略。這些都是進(jìn)一步研究的方向。
linux操作系統(tǒng)文章專題:linux操作系統(tǒng)詳解(linux不再難懂)
倍壓整流電路相關(guān)文章:倍壓整流電路原理
電流變送器相關(guān)文章:電流變送器原理 lc振蕩電路相關(guān)文章:lc振蕩電路原理






評(píng)論