淺談DS80C390雙CAN總線監控系統的設計與實現

CAN總線的全稱是ControllerAreaNetworkBus,簡稱控制器局部網總線,它是現場總線的一種,是一種有效支持分布式控制或實時控制的串行通信網絡。CAN是控制器局域網絡(Controller Area Network, CAN)的簡稱,是由研發和生產汽車電子產品著稱的德國BOSCH公司開發了的,并最終成為國際標準(ISO118?8)。是國際上應用最廣泛的現場總線之一。 在北美和西歐,CAN總線協議已經成為汽車計算機控制系統和嵌入式工業控制局域網的標準總線,并且擁有以CAN為底層協議專為大型貨車和重工機械車輛設計的J1939協議。近年來,其所具有的高可靠性和良好的錯誤檢測能力受到重視,被廣泛應用于汽車計算機控制系統和環境溫度惡劣、電磁輻射強和振動大的工業環境。CAN控制器工作于多主方式,網絡中的各節點都可根據總線訪問優先權(取決于報文標識符)采用無損結構的逐位仲裁的方式競爭向總線發送數據,且CAN協議廢除了站地址編碼,而代之以對通信數據進行編碼,這可使不同的節點同時接收到相同的數據,這些特點使得CAN總線構成的網絡各節點之間的數據通信實時性強,并且容易構成冗余結構,提高系統的可靠性和系統的靈活性。而利用RS-485只能構成主從式結構系統,通信方式也只能以主站輪詢的方式進行,系統的實時性、可靠性較差。
本文以美國Dallas公司的內部帶2個獨立CAN模塊的DS80C390芯片為核心設計一種雙CAN總線分層分布式監控系統,并在電力系統同步靜止補償器(STATCOM)上得到應用。
2 智能雙CAN總線節點
美國Dallas公司的高檔單片機DS80C390是內置雙CAN模塊的嵌入式高速微處理器芯片:每個機器周期僅包含4個時鐘周期,比8051單片機快四倍;支持最大晶振頻率為40MHz,單指令周期100ns;與80C52兼容且與8051指令兼容;有4個8位IO端口、3個16位定時器、256字節RAM、4kB內部靜態SRAM、16個中斷源其中有6個外部中斷源;具有雙串行口、雙CAN口和雙數據指針。
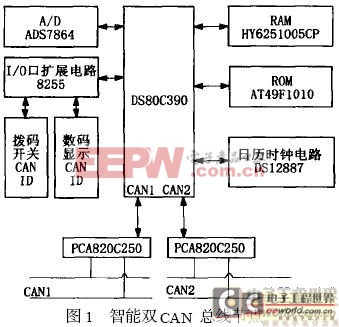
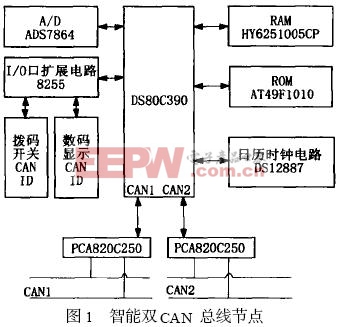
采用DS80C390單片機作為核心的智能CAN節點結構圖如圖1所示。由DS80C390單片機、8255、A/D轉換以及PCA82C250CAN收發器組成。外部程序存儲器選用Atmel公司的AT49F010芯片,最快讀時間45ns,擦除周期時間10s;數據存儲器選用HY628100SOP,該芯片是一種高速CMOS靜態RAM;A/D轉換器ADS7864是德州儀器(TI)公司Burr-Brown產品部最新推出的快速6通道全差分輸入的雙12位A?D轉換器,它能以500kHz的采樣率同時進行六通道信號采樣。時鐘芯片選擇DS12887,可以用來直接代替IBMPC上的時鐘日歷芯片;CAN收發器接口電路是用PHILIP公司生產的PCA82C250實現電平的轉換,以滿足CAN的通信要求。
智能雙CAN節點功能主要包含如下:讀取撥碼開關的值,并以此數據作為ID的一部分,進行ID的設定;啟動A?D轉換,每個轉換通道在交流每周波采集1000點,即每20Ls轉換一次,數據存放在外部數據發送緩沖區中,當上位機召喚數據時,由CAN發送出去;啟動日歷時鐘,當發生故障時,記錄下故障時間,并產生外部中斷申請INT0或INT1。
3 分層分布式監控系統
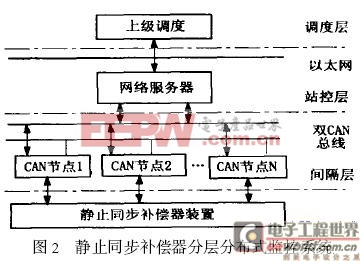
DS80C390片內集成有2個CAN接口模塊,可靠性較高,適合用來實現雙CAN線分層分布式監控系統。電力系統靜止同步補償器分層分布式監測系統的電路原理框圖如圖2所示,整個監控系統分為調度層、站控層和間隔層。
3.1 調度層
調度層包括上級調度計算機和遠動工作站計算機等,可以通過調制解調器撥號或通過以太網與站控層的中央監控計算機網絡服務器進行通信。調度層的監視畫面是由站控層的網絡服務器發布的。調度層是監測系統的管理層。
3.2 站控層
站控層包括1臺中央監控網絡服務器(WebServ2er),WEB服務器是整個監測系統的核心,完成系統的所有監測功能并通過網絡發布到調度層。站控層的WEB服務器包括PC2CAN卡和網卡等,通過PC2CAN卡總線與就地監控的CAN節點通信,完成對裝置進行封鎖脈沖和跳閘操作、封鎖故障指示、水冷報警和故障指示以及語音報警等;采集靜止同步補償器的輸出電壓和系統電壓;站控層通過網卡和調度層的計算機連網。
3.3 間隔層
間隔層共設置40個底層監測雙CAN節點(雙CAN單元),每個底層監測CAN節點用跳線設置本單元號,用數碼管顯示設置的單元號。雙CAN節點連續進行3路模擬量錄波,接收到封鎖或跳閘信號時,繼續錄波2周期后存儲前后2周期錄波數據,發送到站控層的集中監控計算機WEB服務器。
4軟件設計
單片機監控程序是采用KeilC51開發的,在KeiluVision7.0上調試通過。CAN節點的軟件設計采用了模塊化的設計方法,在DS80C390的初始化中,初始化內部寄存器,確定存儲器的分配情況。其設置如下:
SA EQU1
IDMDQU2
CMAEQU1
P4CNT5-3EQU 100B
P4CNT2-0 EQU100B
P5CNT3-0EQU100B
程序采用中斷方式,各程序初始化后,根據不同的中斷調度到相應的中斷服務子程序,在中斷服務程序中,單片機將把記錄的信息通過CAN發送出去,即實現故障錄波功能。系統軟件可利用串口在線升級。
5 結 論
本文研制了DS80C390雙CAN總線分層分布式監控系統,并在電力系統靜止同步補償器中應用,滿足了電力系統中各控制對象分布廣,實時性要求高的要求,極大地提高了系統的安全性、可靠性和抗干擾性。

電度表相關文章:電度表原理
評論