虛擬原型技術與機電一體化技術的結合

本文展示了使用嵌入式分析工具的現代計算機輔助設計(CAD)系統如何實現機電一體化設計。
用戶總是要求我們提高所設計的機械的性能,同時減少資金成本。為了達到這兩個矛盾的目標,我們將注意力放到在機械設計方面有巨大潛力的機電一體化上。
本文審視了當今與機電一體化結合的計算機輔助設計(CAD)工具如何幫助您制造更好的機器。那么,您需要設計制造一臺新的機器要,并且您確信機電一體化的設計方法及虛擬原型技術是正確的途徑,但是該從哪里著手呢?讓我們先來看更為簡單的取放機。
在機電一體化設計中,三個設計團隊(機械,電機與控制)并行工作。不過,在機械團隊完成設計前,電機與控制團隊需要預先得到有關機械的信息。虛擬原型技術可以預先提供機械信息。通過將3DCAD系統與一個運動和結構分析工具,以及一個虛擬控制器相連接,SolidWorks公司與NI公司創建了一個真實的機電一體化設計環境。使用這些工具并不表示機械設計過程中的繁重工作減少了,而是工作量在整個設計周期中由設計團隊分擔了。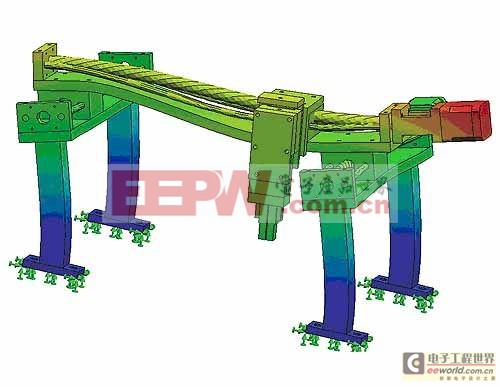
初次共振實驗。虛擬原型技術的巨大價值在于,它允許您出現并校正設計錯誤,而不會出現制造實物樣機所帶來的資金耗費與時間延遲。
虛擬原型技術設計過程
經常失敗與早期失敗是虛擬原型技術設計的必經之路,失敗的方式是在設計過程中——而不是之后。所以您該如何‘失敗’而仍舊成功?訣竅是在正確的事情上失敗,確定什么是您機械的關鍵性能指標(KPI’s),并將這些作為隨后測試的參數與目標。那么,讓我們看看取放機并領會虛擬原型技術如何在設計過程引導我們。

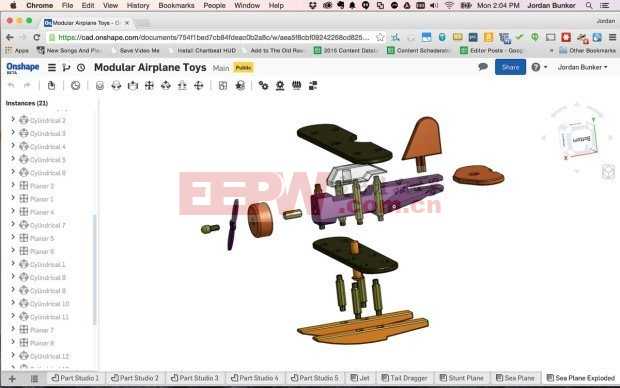
取放機
運動輪廓是所有機械的基石。最簡單的情況是將物體A從B處移到C處。但是在某些情況下,您從B到C的最佳方式并不那么顯而易見。一步運動還是兩步?凸輪還是伺服?利用CAD可以快速地安排機械的運動部件,并檢查沖突與運動范圍。由于大多機械并不是從草圖開始的,最初的CAD組裝很可能是3D模型與布局草圖或是結構圖的混合體。

取放裝配布局
即使只有如此簡單的幾何形狀,SolidWorks仍可以基于草圖或用戶定義的部分計算出近似的力與轉矩。我們現在可以將這些要求告知電機工程師,他們會對馬達與驅動提出建議。再者,我們有可能借助于軟件的優勢直接從3D信息中心(擁有超過一百萬個模型)或者制造商的網站下載馬達與驅動的CAD模型。
裝配馬達與驅動的取放布局
最初的設計迭代提供力的大小來確定“最初估計”的馬達和驅動尺寸。使用裝配圖中包含的馬達與驅動CAD模型,運動仿真能夠快速地重復運行來完善馬達與驅動需求。當機械設計成熟并且CAD裝配變得更加完整,運動分析軟件可以周期性地重復運行,確保實物樣機制造時不會出現意外。



評論