基于CAN總線的汽車車身控制系統的研究

隨著汽車電子技術的不斷發展,汽車上的各種電子裝置越來越多,電子控制裝置之間的通訊也越來越復雜,而汽車上傳統的電氣系統大多采用點對點的單一通信方式,相互之間少有聯系,造成了龐大的布線系統,已遠遠不能滿足汽車愈加復雜的控制系統要求。汽車控制局域網CAN 總線應運而生,它廣泛應用于汽車電子控制系統中,為實現汽車控制部件的智能化和汽車控制系統的網絡化提供了一個有效的途徑和方法。
2 CAN總線技術簡介
CAN 總線是德國BOSCH 公司從20 世紀80 年代初為解決現代汽車中眾多的控制與測試儀器之間的數據交換而開發的一種串行數據通信協議,它是一種多主總線,通信介質可以是雙絞線、同軸電纜或光導纖維。通信速率可達1Mb/s.CAN 總線通信接口中集成了CAN 協議的物理層和數據鏈路層功能,可完成對通信數據的成幀處理,包括位填充、數據塊編碼、循環冗余檢驗、優先級判別等項工作。CAN 協議的一個最大特點是廢除了傳統的站地址編碼,而代之以對通信數據塊進行編碼,最多可標識2048(2.0A)個或5 億(2.0B)多個數據塊。采用這種方法的優點可使網絡內的節點個數在理上受限制。數據段長度最多為8 個字節,不會占用總線時間過長,從而保證了通信的實時性。CAN 協議采用CRC檢驗并可提供相應的錯誤處理功能,保證了數據通信的可靠性。
3 系統設計思想
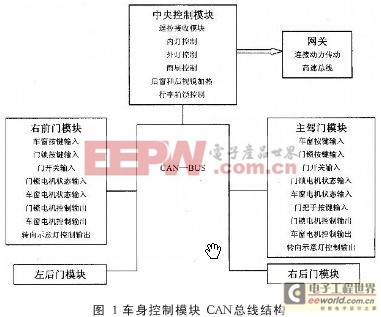
汽車車身系統的控制對象包括:4個車門鎖、2個以上車窗玻璃升降器、行李箱鎖、除霜加熱器、電動后視鏡、前后大燈、小燈、轉向燈、危險燈、霧燈、牌照燈、車內閱讀燈、車廂頂燈等。在具備遙控功能的情況下,還包括對遙控信號的接收處理和防盜系統的控制。因此,根據以上要完成的各功能,將本系統設計為5個子模塊,分別是中央控制模塊(實現中控門鎖、防盜、雨刮、內外燈和后窗及后視鏡加熱等功能),4個門控模塊(分別為主駕門模塊、右前門模塊、左后門模塊、右后門模塊,來控制車窗升降器和門鎖)。圖1給出了車身控制模塊CAN總線結構。
4 基于CAN總線車身控制系統的硬件開發
4.1 系統各模塊電路框圖
根據以上設計思想分為5個子模塊。
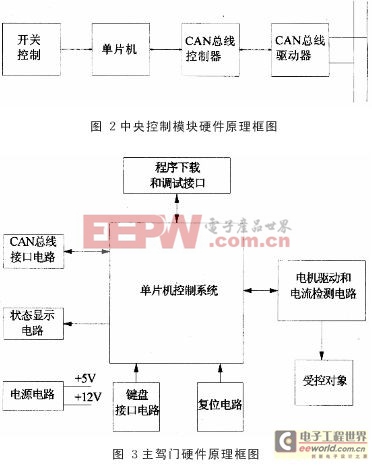
主控單元接收開關信號之后,先進行分析處理,然后通過CAN總線把控制指令發送給各受控端,各受控端響應后作出相應的動作。
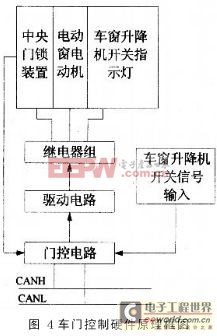
以下是各模塊的電路框圖見圖2、圖3、圖4.
4.2 系統主要使用的元器件
(1)CAN控制器。考慮到系統拓展的需要,我們采用PHILIPS公司生產的SJA1000來作為此系統的CAN控制器。它既和PCA82C200獨立CAN控制器引腳兼容,又和PCA82C200獨立CAN控制器電氣兼容;既支持Basic CAN模式,又支持PeliCAN模式;和CAN2.0B協議兼容;可同時支持11位和29位識別碼;位速率可達1Mbits/s.
(2)CAN收發器。采用PHILIPS公司生產TJA1050,跟PCA82C250一樣,TJA1050符合ISO11898標準,但在關鍵的AM波段上它的輻射比PCA82C250低20dB以上。在不上電時總線呈現無源特性。
(3)單片機。采用P89C51.該單片機是80C51微控制器的派生器件,是采用先進CMOS工藝制造的8位微控制器,指令系統與80C51完全相同。
5 基于CAN總線車身控制系統的軟件開發
在CAN總線構成的系統中,用戶要根據自己的要求來編寫應用層和用戶層軟件。用戶層實現用戶要求的控制策略和系統,而應用層則是在用戶層與接口之間,CAN建立了報文發送時的方法、信號電平及協議,應用層則定義了結構、響應及報文的意義,應用層要根據CAN系統應用場合的不同而有所變化。
5.1 CAN控制器的初始化
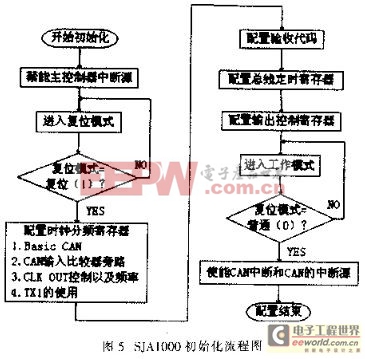
CAN控制器SJA1000在正式收發信號之前必須進行初始化設置。對SJA1000的初始化是對工作方式、接收濾波寄存器、接收屏蔽寄存器、接收代碼寄存器、波特率參數等的設置,要求對寫入每個寄存器的內容進行仔細和全面的考慮。其初始化流程見圖5.
5.2 CAN總線上數據的發送和接收
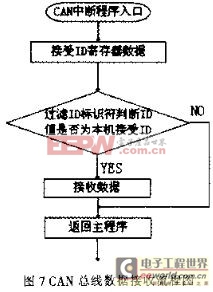
對SJA1000初始化成功后,就可以用它來傳輸和接收報文。節點向總線發送報文的過程是:單片機P89C51將待發送的數據按CAN格式組成一幀報文,寫入SJA1000的發送緩沖區,然后啟動SJA1000,把報文發送到總線上去。接收報文的過程是:SJA1000從總線上自動接收報文,并經過過濾后存入接收緩沖區,并向單片機發出中斷請求,單片機從緩沖區讀取報文。發送和接收流程見圖6、圖7.

6 結束語
CAN總線以其高性能、高可靠性及其獨特的設計越來越受到人們的重視,并被公認為是汽車電控系統中最有前途的總線之一。它作為一種可靠的汽車計算機網絡總線已在許多先進汽車上得到應用,使得各汽車計算機控制單元能夠通過CAN總線共享所有信息和資源,達到簡化布線、減少傳感器數量、避免控制功能重復、提高系統可靠性和維護性、降低成本、更好地匹配和協調各個控制系統的目的。










評論