一種自動割草機器人的設計和實現

1 系統結構
自動割草機器人主控系統的結構框圖如圖1所示。系統主要由單片機控制系統、傳感器系統、電機驅動系統3大部分組成。其中單片機控制系統的處理器采用國產芯片STC12C5410AD,包含10 bit的ADC以及串口、I2C等通用串行接口,高達40 MHz的主頻完全可以勝任本系統的計算和處理速度。
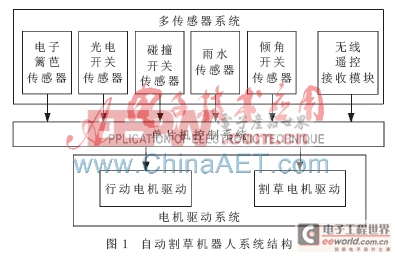
運動系統主要通過單片機給出的多路PWM信號對自動割草機器人的行動電機以及割草電機進行控制。傳感器系統由電子籬笆傳感器、光電開關傳感器、碰撞開關傳感器、雨水傳感器、無線遙控接收模塊等組成。其中,電子籬笆傳感器用于探測割草區域的邊緣;光電開關傳感器用于避開慢速的或者靜止的障礙物;碰撞開關傳感器用于避開快速的或者主動碰向割草機的物體;雨水傳感器用于檢測下雨天氣,并且相應作出回基站的操作;傾角開關傳感器用于安全措施,防止自動割草機器人在割草過程中發生意外事件翻倒,一旦傳感器檢測的角度超過設定的閾值,系統自動停止一切工作,進入休眠狀態;無線遙控部分用于方便使用者無線控制自動割草機器人,無線遙控的距離約20 m.各個系統都采用模塊化設計,可擴展性高、升級維護方便、二次開發周期短。表1為自動割草機器人參數表。
2 硬件系統設計
2.1 主控系統
主控系統采用STC12c5410AD單片機,最高主頻40 MHz,8路AD輸入,可以滿足自動割草機器人系統的控制需求。本系統采用30 MHz的有源晶振,8路AD輸入基本上可以滿足系統中模擬量的采集需求。
2.2 運動控制系統
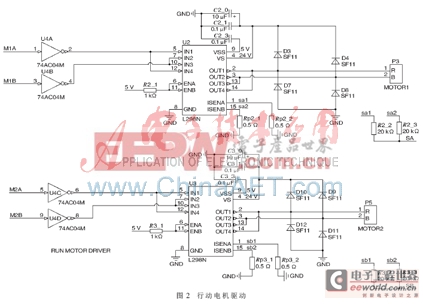
運動控制系統中行動電機部分采用2片L298直流電機驅動芯片對直流電機進行控制。1片L298驅動芯片可以提供最高3 A的驅動電流,本系統的行動電機供電電壓為24 V,對于設計要求行動總功率不大于60 W的驅動系統來說,2片L298擁有足夠的驅動能力。在機械結構上,電機軸上使用了減速齒輪,用于加大最大電機輸出轉矩,提高在草地上行走的能力。
割草電機驅動部分采用mosfet驅動,IRLR2705這款mosfet可以提供峰值28 A的電流,滿足了割草電機的要求。割草電機的開通和關斷由一個單片機IO控制。割草電機驅動有一個電流檢測反饋環節,當割草電機的工作電流過大(一般是堵轉時),電流信號被采樣電阻取出并且送往單片機AD轉換器中進行檢測并且軟件保護。防止堵轉的電機燒毀mosfet管。電機驅動電路圖如圖2.
光電開關相關文章:光電開關原理 電能表相關文章:電能表原理

評論