車用毫米波雷達傳感器組網技術研究

2.2 同步控制
雷達組網后,同樣是通過測量發射信號和回波信號之間的頻率差來確定目標的位置。但不同于單個雷達探測,汽車雷達網絡測量目標的距離和速度是通過對每個傳感器測得的目標信息進行數據融合而得到的。為了測量目標距離以及產生一致的波形,發射機和接收機要有統一的時間標準,這就是時間上的同步。為了能接收和放大回波信號,雷達傳感器的發射機和接收機必須工作在相同的頻率,當發射機頻率捷變時,接收機本振要作相應的變化,即要實現頻率上的同步。汽車雷達網絡對傳感器之間的時間同步控制誤差要求在10ns內。所以高精度時間頻率同步系統是汽車雷達傳感器組網的關鍵技術。圖4給出了基于DDS同步時鐘源的配置[3],各個收發單元上的DDS同步時鐘源的參考頻率源應采用高穩定度的原子鐘(如銣、銫原子鐘)。各收發單元的原子鐘要定期的用同一時間基準來校準。用作校準的時間基準的精度要更高一些,它們可以是GPS(導航星全球定位系統),羅蘭C或彩色電視發射臺發射的時間基準信號.
2.3汽車雷達網絡的目標分類算法
目標分類系統的主要任務是針對目標回波信號特征計算給定向量的分類關系,分類器定義了一組不同的目標類別。分類器的工作可以分為研究階段和分類階段,在研究階段分類器對若干特征和經過獨立標記的特征向量進行自動分析;在分類階段,要對每個被檢測到的目標生成特征向量。與此同時,識別算法采用最大似然方法進行判決,以判別特征向量屬于哪個類,如圖5所示。在汽車應用中,由于分類任務很復雜,通常一個給定的向量需要考慮幾個特征,因而要采用多個分類器,其優點是在研究階段能夠在一次迭代過程中評估某個特征對決策過程的影響,并自動剔除對決策過程影響較小的項目。文獻[4]給出了基于汽車雷達傳感器的目標分類系統的系統結構和信號處理過程,它可以識別六種不同的雷達目標的類別,包括:步行者、騎自行車的人、車輛、人群、樹木和交通標志等。
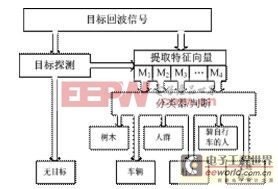
圖5 汽車雷達對目標的分類處理過程
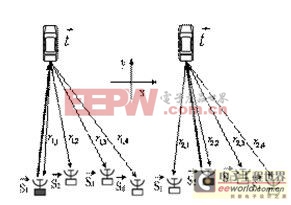
圖6 汽車雷達網絡對單目標
實現測量
3 運動目標位置估算算法
FMCW雷達的基本原理是利用發射和回波信號之間的頻率差來確定目標的距離和速度[5]。傳統體制的FMCW采用等周期調頻,在測量單個目標的情況下,簡單可行,表現了良好的實時性和測距測速功能。但是當前方出現多個目標的時候,雷達就會出現判斷上的困難。為了識別多個目標的距離和速度,可以采用變周期的 FMCW波形作為發射信號。文獻[6]給出了采用變周期的發射信號測量目標的距離和速度的算法。
對于本文所討論的雷達網絡系統而言,四個近距離雷達傳感器即是發射機又是接收機。如圖6所示,通過電掃開關的控制,其中的一個NDS擔當發射機,反射信號被四個NDS同時接收。經過信號處理之后,因各個NDS之間位置的不同,可以得到四組關于被測目標的距離和相對速度值(r1, 1 v1, 1)、(r1, 2 v1, 2)、(r1, 3 v1, 3)、(r1, 4 v1, 4)。這種采用單基地發射多基地接收的雷達網絡體制,盡管對傳感器之間的時間同步控制要求很高,但是可以避免鄰近傳感器之間的相互干擾。
汽車雷達網絡測量目標的距離和速度是通過對每個傳感器測得的目標信息進行數據融合而得到的。在一個測量周期中,每個NDS輪流擔當一次發射機。因此有16種距離和相對速度的組合,用向量表示為:
在笛卡爾坐標系中用目標的狀態向量他t來表述目標的位置矢量和相對速度矢量:
 (2)
(2)
每個傳感器在笛卡爾坐標系中的位置用向量s表示為:
 (3)
(3)
對于每個傳感器而言,如果已知該傳感器和目標在坐標系中的位置,那么目標的距離可以由下面的非線性方程來計算:
 (4)
(4)
同理,得到關于目標的相對速度的方程:
 (5)
(5)
綜合方程(1)、(2)、(4)、(5) , 可以得到目標的狀態向量與四個傳感器測得的目標的距離速度的多個非線性方程,用向量函數表示成:
 (6)
(6)
其導數矩陣,也就是雅可比矩陣為:
 (7)
(7)



評論