基于單目視覺的智能車輛視覺導航系統設計

2.2 車輛檢測
圖像中包含車輛前方很大視野內的物體,如道路、樹木、護欄、標牌以及其他車輛,要從中準確檢測出前方車輛是一項困難的工作,而本文的車輛檢測模塊會根據圖像背景自動改變設置參數,以適應不斷變化的道路場景和光照條件。
要實現車輛的快速檢測,首先需要根據車輛的基本特征進行初步檢測,將所有可能的疑似車輛區域從圖像中提取出來,然后再根據其他特征對疑似區域進行篩選排除。
2.2.1 車輛初步檢測
初步檢測采用的特征是車輛陰影,即一塊位于目標車輛底部、灰度值明顯比附近路面區域低的區域。在一般環境條件下,大部分車輛都具有這一顯著特征。
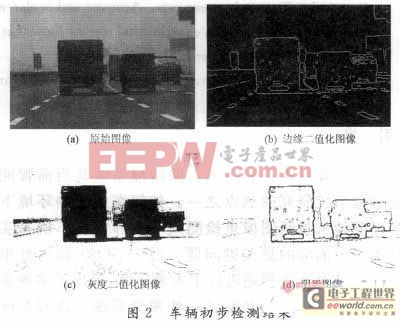
車輛初步檢測的流程如圖1所示。車輛陰影和車道一樣具有灰度突變的特點,因此可以調用車道檢測算法對圖2(a)中的原始圖像做二值化處理,得到圖2(b)中的邊緣二值化圖像。同時還要對原始圖像進行灰度二值化,得到圖2(c)中的灰度二值化圖像。為提高檢測實時性,以本車附近路面區域的平均灰度作為二值化閾值。由于邊緣二值化圖像和灰度二值化圖像都包括了車輛的下底邊,將這兩幅圖像進行“或”運算,就可以得到如圖2(d)所示的車輛陰影圖像。

在陰影圖像中由下至上逐行搜索,尋找連續陰影點超過一定閾值的線段,并以此線段為底邊劃出一個矩形區域作為疑似車輛區域。為保證疑似區域包含車輛整體,矩形的寬度比線段稍寬,高度由寬度按比例給出。為避免重復搜索,將已搜索到的疑似區域內陰影完全抹去。由于同一車輛的各個部分可能分別被檢測為疑似目標,因此還需要對各個相交的疑似區域進行合并。由于前方車輛的遮擋,可能會將多個目標認定為一個目標,但是對本車的安全無影響。
2.2.2 篩選驗證
如果單純采用陰影特征進行車輛檢測,在保證較低“漏警”率的同時,也造成了較高的“虛警”率,因此還需要對疑似區域進行篩選和驗證。
對于結構化道路,車輛寬度與車道寬度的比值應該是大致固定的,那么當攝像機的焦距、俯仰角等參數固定后,圖像上車道寬度(像素數)與車輛寬度(像素數)也滿足這個比例。根據之前檢測的車道方程,就可以計算出感興趣區域內任意縱坐標上車輛圖像寬度的范圍,并剔除寬度不在此范圍內的疑似區域。


評論