蓄電池電機車調速系統分析及其改造設計

3 電機車回饋制動的控制
電動機等效電路如圖2所示。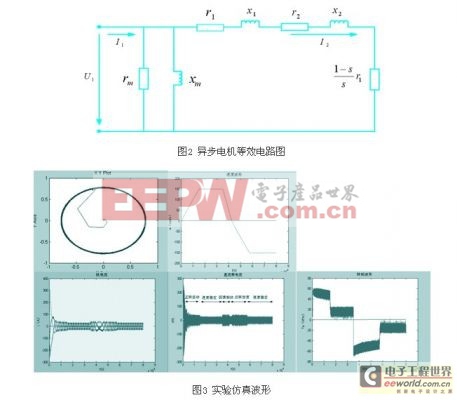
假設電機所帶負載的機械能基本上被電機內部所消耗,于是有
當電機負轉差率位于范圍時,系統的機械能經電機轉化為電能向蓄電池回饋。同時電機不出現過流,也就是反饋的電能不能被電池吸收的部分,可以由電機本身承受消耗而不出現過流當轉差率變化超過該范圍時,機械能經電機轉化的電能無法有效回饋給電池,而剩余部分的能量在電機的線圈內阻中又無法完全消耗,因此容易出現過流。所以,從簡化控制的角度出發,當控制轉差率在s1≥s≥s2范圍內變化時,再生制動過程就可以避免出現過流。
本文提出的再生制動方法在直接轉矩控制(dtc)中。首先觀測定子磁鏈,控制定子磁鏈的幅值為恒定然后選擇零矢量、非零矢量來調節瞬時轉差,控制輸出轉矩恒定,所以,由磁鏈環節觀測定子磁鏈的幅值及相位,并且選擇矢量控制磁鏈幅值大小;轉矩控制環節(與磁鏈控制環節相結合)選擇矢量控制磁鏈的旋轉速度。系統采用了直接轉矩控制方式,其磁鏈控制環節可以有效的控制磁鏈的偏差,在這種情況下可以保證輸出的電流諧波少,運行平穩。而在直接轉矩控制的基礎上實現的再生制動控制,就是使定子頻率跟蹤轉子速度變化,只要能保證轉差率的變化范圍,就可以實現系統在制動過程中不出現過流。而且制動效果的強弱可以通過調節轉差率和定子磁鏈負值來實現。
4 仿真結果
對以上建立的新型直接轉矩控制異步電動機變頻調速系統進行仿真實驗。三相逆變器開關器件采用igbt,反并聯反饋二極管,igbt的緩沖電阻rs=10kω,緩沖電容cs=10-3μf。仿真實驗所采用的異步電動機參數為:額定功率pn=12kw,額定頻率fn=50hz,ψn=0.95wb,rs=0.16891ω,rr=0.13973ω,ls=0.02877h,lm=0.02777h,lr=0.0289h,np=2,j=0.1349kg.m2。控制系統參數:ψ*s=0.95wb,速度給定為150rad/s,負載轉矩給定tm=15n.m,轉矩限幅值為80n.m,pi調節器的比例系數kp=50,積分系數ki=130,直流側電壓udc=600v。
首先速度給定設為150rad/s,等到系統穩定以后,再將速度給定設為-150rad/s,觀察其磁鏈,速度,轉矩,線電流,直流側電流波形。
從圖3波形可以看出,異步電動機處于加速減速反轉等運行狀態,從正向加速到回饋制動,最后到反向加速至穩定狀態,實現異步電動機的四象限特性。
5 結束語
我國礦用蓄電池電機車多數采用的是直流電動機串電阻調速,若是課題的成功得以順利的應用于煤礦實際中,無論是電機車的調速性能,牽引能力,承載量和維修量等方面都有全面的提升,另外,從經濟效益出發,蓄電池電機車利用制動對蓄電池進行充電,節約了大量的電能,延長蓄電池電機車的工作時間,減少了蓄電池年平均充電數,延長了蓄電池的使用壽命,大大提高了經濟效益。
三相異步電動機相關文章:三相異步電動機原理 調速器相關文章:調速器原理 汽車防盜機相關文章:汽車防盜機原理



評論