基于USB接口的機器人上下位機通信

PL-2301包括兩套獨立的USB控制單元。在握手信號的協調下,它們通過兩個FIFO緩沖器無阻塞地交換數據。PL-2301包含四個終端:缺省的控制終端(地址00H)、中斷終端(地址81H)、塊輸出終端(地址02H)、塊輸入終端(地址83H)。控制傳輸用于在主機列舉階段完成對PL-2301的配置及在兩臺主機通信時控制PL-2301的握手信號;中斷傳輸用于PL-2301定期(每毫秒一次)向主機報告握手信號的狀態;塊傳輸用于兩臺主機之間實時地交換數據。塊傳輸支持錯誤檢測,這對實時通信和控制很重要。控制傳輸被確保擁有10%的USB總線帶寬,中斷傳輸和等時傳輸最多可以使用90%的帶寬,塊傳輸使用剩余的最大可用帶寬(最多95%)。當總線不太忙時,由于塊傳輸只有一個很小的協議頭(13字節),它是所有傳輸類型中最快的。為了確何教學機器人上下位機以最快的速度通信,滿足實時性要求,最好不要在USB總線上掛接過多的USB外設。
PL-2301除了能對USB標準請求做出反應外,還能對幾種廠商自定義的請求做出反應。自定義請求ClearQuickLinkFeature和SetQuickLinkFeature用于控制兩臺主機通信時PL-2301的握手信號。這些握手信號是:
(1)TX_RDY指示本地USB端口是否準備好傳輸數據的指示信號。
(2)S_EN掛起使能信號。置位后,PL-2301支持標準的USB掛起特性。
(3)RESET_O塊輸出管道的復位信號,用于出現錯誤時復位塊輸出通道。
(4)RESET_IN塊輸入管道的復位信號,用于出現錯誤時復位塊輸入管道。
(5)TX_REQ塊傳輸的請求信號。
(6)TX_C塊傳輸完成的指示信號。
(7)PEER_E告訴對方本地端口是否連接好的指示信號。
在這幾個握手信號的協調下,上位機和下位機可以雙向通信。圖2是主機PC A向PC B傳輸數據的流程圖。這些底層的細節問題并不需要控制,由PL-2301的驅動程序完成。
3 軟件結構
3.1 教學機器人軟件結構
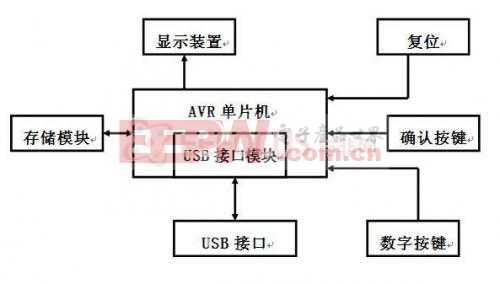
EDUROBOT-680-II型教學機器人控制系統的控制軟件包括下位機的底層控制軟件和上位機的上層控制軟件,它們通過USB端口通信。其軟件結構如圖3所示。

評論