基于CORTEX-M3和CAN的印染機同步控制系統(tǒng)

0 引言
隨著社會生活的發(fā)展,人們對現(xiàn)在的印染品的要求也越來越高,特別是布匹與包裝外殼,那么對現(xiàn)代印染工藝的要求也越來越高。隨著工藝的增加,對印染設(shè)備是個不小的挑戰(zhàn),這里面最主要的是大型印染聯(lián)合機中多電機的同步控制問題。
在印染設(shè)備中,電機的同步控制主要有3方面決定:一是處理器對張力傳感器數(shù)據(jù)的處理速度,以及電機對張力傳感器的反應(yīng)速度;二是不同的電機組之間機械性能的差異以及它們產(chǎn)生的實時同時控制問題;三是控制單元與各電機組之間的通信問題,包括速率,抗干擾等。傳統(tǒng)印染聯(lián)合機的做法是采用單片機加AD/DA芯片進行數(shù)據(jù)的處理與執(zhí)行,也有為了提高數(shù)據(jù)的處理能力而采用DSP加單片機的做法。隨著現(xiàn)在技術(shù)的發(fā)展,在研究了基于ARM的CORTEX-M3內(nèi)核的處理器加CAN總線的分總系統(tǒng)設(shè)計方法。
總控制器和單元控制器,采用ST公司推出的基于ARM公司Cortex-M3核的STM32F103芯片嘗試進行新的設(shè)計。這種設(shè)計在提高系統(tǒng)性能的基礎(chǔ)上降低了成本同時實現(xiàn)了與現(xiàn)有印染設(shè)備的對接問題。
1 系統(tǒng)設(shè)計
1.1 系統(tǒng)結(jié)構(gòu)設(shè)計
根據(jù)現(xiàn)有印染行業(yè)的印染聯(lián)合機的具體情況,主要針對其控制系統(tǒng)進行改進。
在大型印染聯(lián)合機的設(shè)計中,主要考慮的是多電機的同步控制問題,需要保證布匹在傳送的過程中要平穩(wěn),不能因為電機的不同步而造成張力過大從而使布匹過度拉伸,也不能因為張力的不足而造成布匹的褶皺。在大型印染聯(lián)合機中根據(jù)工藝的復(fù)雜與簡單,需要同步的電機從8個到40多個不等,采用CAN總線網(wǎng)絡(luò)保證了可以根據(jù)工藝的不同自主的擴展單元控制器的個數(shù)。系統(tǒng)設(shè)計框圖如圖1所示。
1.2 系統(tǒng)的組成
系統(tǒng)主要由主控制器,單元控制器,CAN總線網(wǎng)絡(luò),以及變頻器組成。
主控制器是系統(tǒng)的主控單元,主要功能是顯示和控制整個系統(tǒng)狀態(tài)的工作狀態(tài),以及設(shè)置和調(diào)節(jié)系統(tǒng)的總要工作參數(shù),如布速,張力傳感器的靈敏度。協(xié)調(diào)各單元控制的工作狀態(tài)。
單元控制器的功能主要是微調(diào)張力傳感器的靈敏度,實時監(jiān)測個張力傳感器的數(shù)據(jù),根據(jù)各張力傳感器的數(shù)據(jù)調(diào)節(jié)輸出電壓從而調(diào)節(jié)對應(yīng)電機的工作狀態(tài),同時還要應(yīng)對突發(fā)狀況,例如張力傳感器失靈的處理,以及電機失速的處理。
1.3 單元控制器的具體設(shè)計
在設(shè)計中我采用的是基于ARM的CORTEX-M3內(nèi)核的芯片-STM32f103RCT6如圖2所示。它的特點有:STM32F103系列微處理器是首款基于ARMv 7-M體系結(jié)構(gòu)的32位標準RISC(精簡指令集)處理器,提供很高的代碼效率;工作頻率為72MHz,內(nèi)置高達256KB的FLASH存儲器和48KB的SRAM。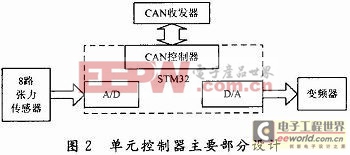
它內(nèi)部集成了12位的A/D以及雙通道的12位的D/A,還有專門面向工業(yè)控制的控制器區(qū)域網(wǎng)絡(luò)(CAN),它提供兼容規(guī)范2.0A和2.0B(主動),位速率高達1 Mb/s。它可以接收和發(fā)送11位標識符的標準幀,也可以接收和發(fā)送29位標識符的擴展幀。具有3個發(fā)送郵箱和2個接收FIFO,3級14個可調(diào)節(jié)的濾波器。
1.4 CAN總線接口設(shè)計
因為STM32的CAN總線控制器的邏輯電平均采用LVTTL,所以采用德州儀器公司生產(chǎn)的CAN總線收發(fā)器SN65HVD230。SN65HVD230可用于較高干擾環(huán)境下。它采用差分接收,具備抗寬范圍的共模干擾、電磁干擾能力。6N137構(gòu)成的隔離電路,這樣就可以很好地實現(xiàn)CAN總線上各節(jié)點的電氣隔離。增加隔離電路雖然增加了節(jié)點的復(fù)雜性,但它卻提高了節(jié)點的穩(wěn)定性和安全性。此外,為避免信號反射,導(dǎo)致通信的可靠性與抗干擾能力下降,甚至無法通信,因此,在CAN總線的兩端需要加有2個120Ω的總線阻抗匹配電阻。CAN接口設(shè)計如圖3所示。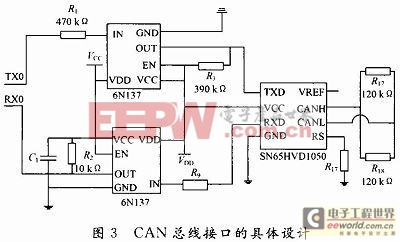
2 系統(tǒng)工作原理
系統(tǒng)的工作原理主要包括4部分:系統(tǒng)的工作前的調(diào)節(jié),系統(tǒng)的啟動,工作中的時時同步調(diào)節(jié)以及對故障的處理。
(1)在系統(tǒng)工作前,因為印染設(shè)備的各電機單元機械部分屬性不可能都相同,所以要在傳送布匹前調(diào)節(jié)各個部分的運轉(zhuǎn)同步系數(shù)Li使其沒有負載時線速度一樣。在這里一般設(shè)置第1個單元控制器的第1個電機單元為主令單元,其他的為從動單元。需要調(diào)節(jié)個從動電機單元的運轉(zhuǎn)速度與主動單元的線速度一致。這個系數(shù)Li設(shè)置后就在以后的運行中固定下來。
(2)系統(tǒng)的啟動是由主控制器先向各單元控制器發(fā)出控制命令,包括設(shè)置布速V,以及達到布速v的上升時間間隔,然后主控制器給出總的啟動命令,單元控制器根據(jù)主控制器的命令設(shè)置對應(yīng)的8路信號輸出,從而控制各電機單元按照預(yù)先的設(shè)置的上升時間間隔運轉(zhuǎn)至設(shè)定的轉(zhuǎn)速。
(3)系統(tǒng)工作中的調(diào)節(jié),根據(jù)印染聯(lián)合機的實際工作中,當當電機轉(zhuǎn)速增加時,會改變張力傳感器的測量數(shù)據(jù)。根據(jù)公式:
Vout=V0Li+KiFi (1)
式中:Vout為D/A轉(zhuǎn)化的輸出電壓;Li為系統(tǒng)啟動前設(shè)置的運轉(zhuǎn)同步系數(shù);V0為主動電機單元的D/A輸出電壓;Fi為張力傳感器的輸出;Ki為VOUT輸出對張力傳感器輸出反饋Fi的靈敏性。通過輸出反饋Fi,在電機的控制端組成了一個小的閉環(huán)系統(tǒng)。張力傳感器示意圖如圖4所示。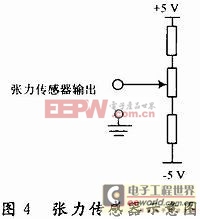










評論