幾種網(wǎng)絡(luò)控制系統(tǒng)的比較及典型應(yīng)用

1. 引言
網(wǎng)絡(luò)控制系統(tǒng)(NCSs)是近年來發(fā)展形成的自動(dòng)控制領(lǐng)域的新技術(shù),是計(jì)算機(jī)網(wǎng)絡(luò)、通信與自動(dòng)控制技術(shù)結(jié)合的產(chǎn)物[1]。隨著自動(dòng)控制、計(jì)算機(jī)、通信、網(wǎng)絡(luò)等技術(shù)的發(fā)展,企業(yè)的信息集成系統(tǒng)正在不斷壯大,而網(wǎng)絡(luò)化控制是復(fù)雜控制系統(tǒng)和遠(yuǎn)程控制系統(tǒng)的客觀需求。[2]
在工業(yè)中已成功應(yīng)用了幾十年的傳統(tǒng)控制系統(tǒng),隨著物理設(shè)備和系統(tǒng)功能的擴(kuò)充,在很多方面已經(jīng)達(dá)到了它的應(yīng)用極限,而具有通用總線結(jié)構(gòu)的網(wǎng)絡(luò)系統(tǒng),即網(wǎng)絡(luò)控制系統(tǒng)NCS,則以其完整的體系結(jié)構(gòu),分布式的操作運(yùn)行模式,相對獨(dú)立又能很好互聯(lián)的通信方式,節(jié)省的布線和信號可靠性,顯示出種種優(yōu)點(diǎn)。[3]
然而在目前的市場上存在著多種網(wǎng)絡(luò)控制系統(tǒng)并存的局面,國際標(biāo)準(zhǔn)化組織還難以將其統(tǒng)一。對于大多數(shù)企業(yè)來說,選擇不同的系統(tǒng)在人力、財(cái)力、物力上都要有相應(yīng)不同程度的投入,因此決定何種系統(tǒng)更適合自己的生產(chǎn)控制狀況,對于提高企業(yè)生產(chǎn)力具有一定作用,本文初步總結(jié)了每種網(wǎng)絡(luò)控制系統(tǒng)的特點(diǎn),以期給各企業(yè)改進(jìn)生產(chǎn)提供一定的幫助。此外,列舉了目前比較典型的兩種網(wǎng)絡(luò)控制系統(tǒng)的應(yīng)用,具體展現(xiàn)NCSs的實(shí)用性。
2. 幾種網(wǎng)絡(luò)控制系統(tǒng)的比較
目前NCS研究領(lǐng)域的兩大主流方向就是:①源于自動(dòng)控制技術(shù)以滿足系統(tǒng)穩(wěn)定及動(dòng)態(tài)性能(quality of performance, QoP)為目標(biāo)的分析手段;②源于計(jì)算機(jī)網(wǎng)絡(luò)技術(shù)以保證多媒體信息傳輸和遠(yuǎn)程通信服務(wù)質(zhì)量(quality of service, QoS)的分析手段[4][5],本文主要從數(shù)據(jù)通信技術(shù)方面,也就是QoS角度來比較他們的不同。
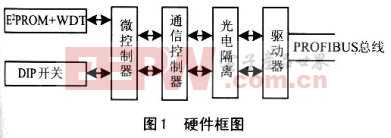
下面主要比較幾種網(wǎng)絡(luò)控制系統(tǒng)CAN、FF、PROFIBUS和LonWorks的通信模型。工業(yè)現(xiàn)場有其具體特點(diǎn),如果按照OSI7層模式的參考模型,由于層間操作與轉(zhuǎn)換的復(fù)雜性,網(wǎng)絡(luò)接口的造價(jià)與時(shí)間開銷顯得過高。為滿足實(shí)時(shí)性要求,也為了實(shí)現(xiàn)工業(yè)網(wǎng)絡(luò)的低成本,現(xiàn) 場總線采用的通信模型大都在OSI模型的基礎(chǔ)上進(jìn)行了不同程度的簡化[3]。如下圖所示:
2.1 CAN的通信參考模型
CAN(controller area network)是控制器局域網(wǎng)的簡稱,是德國Bosch公司在1986年為解決現(xiàn)代汽車中眾多測量控制部件之間的數(shù)據(jù)交換問題而開發(fā)的一種串行數(shù)據(jù)通信總線。
參照ISO/OSI標(biāo)準(zhǔn)模型,CAN分為數(shù)據(jù)鏈路層(包括邏輯鏈路控制子層LLC和介質(zhì)訪問控制子層MAC)和物理層。如圖1中CAN部分所示。
MAC子層主要規(guī)定傳輸規(guī)則,即控制幀結(jié)構(gòu)、執(zhí)行仲裁、錯(cuò)誤檢測、出錯(cuò)標(biāo)定和故障界定。MAC子層要為開始一次新的發(fā)送確定總線是否開放或者是否馬上開始接收。位定時(shí)也是MAC子層的一部分。物理層規(guī)定了節(jié)點(diǎn)的全部電氣特性。
CAN的通信協(xié)議由CAN通信控制器完成。CAN通信控制器由實(shí)現(xiàn)CAN總線協(xié)議的部分和跟微控制器接口部分的電路組成。
2.2 FF的通信參考模型
FF數(shù)據(jù)通信與控制網(wǎng)絡(luò)技術(shù)是由現(xiàn)場總線基金會(huì)FF(fieldbus foundation)組織開發(fā)的,已被列入IEC61158標(biāo)準(zhǔn)。
FF的參考模型只具備ISO/OSI參考模型7層中的物理層、數(shù)據(jù)鏈路層和應(yīng)用層,并把應(yīng)用層劃分為總線訪問子層和總線報(bào)文規(guī)范子層,不過它又在原有ISO/OSI參考模型的第7層應(yīng)用層之上增加了新的一層——用戶層。
其中,物理層規(guī)定了信號如何發(fā)送;數(shù)據(jù)鏈路層規(guī)定如何在設(shè)備間共享網(wǎng)絡(luò)和調(diào)度通信;應(yīng)用層規(guī)定了在設(shè)備間交換數(shù)據(jù)、命令、事件信息以及請求應(yīng)答中的信息格式;用戶層用于組成用戶所需要的應(yīng)用程序,例如規(guī)定標(biāo)準(zhǔn)的功能塊、設(shè)備描述,實(shí)現(xiàn)網(wǎng)絡(luò)管理、系統(tǒng)管理等。模型如圖3中FF部分所示。

數(shù)字通信相關(guān)文章:數(shù)字通信原理
通信相關(guān)文章:通信原理






評論