一種智能化倒車雷達主控芯片設計

3 智能化原理
3.1 防聲波衍射處理
由于聲波傳輸的特性,聲波會出現未經實際物體反射就直接回到探頭被檢測到,造成處理器認為是實際發射接收到的信號,直接導致誤報。但聲波衍射的干擾強度很難達到實際物體有效反射的超聲波強度,所以可通過識別來判斷。硬件一旦判定收到的超聲波信號是聲波衍射返回的信號,則自動忽略該結果,芯片繼續等待在固定時間△T內是否有有效反射波,有則進行處理,沒有則轉入下一探頭的驅動。
3.2 智能識別處理
由于地面上的小物體,比如磚塊,石塊,水果都會造成超聲波的反射,并讓探頭檢測到。而這些物體并不影響車輛的倒車操作,所以實際上是一種誤報現象。所以硬件要對這種情況進行處理,提高報警的準確性。
智能識別處理可以通過不同大小的物體反射的超聲波幅度不同來判斷。所以一旦確定多大的物體不會影響倒車的操作,就可以明確地測量該物體在不同距離上的超聲波發生的幅度和轉換后的電平大小,處理器可根據實驗測試出來的結果在模擬或數字部分進行處理,根據要求忽略掉相應的接收信號。與防聲波衍射處理一樣,硬件忽略掉無效反射波后要繼續等待在固定時間△T內是否有有效反射波,有則進行處理,沒有則轉入下一探頭的驅動。
3.3 環境適應處理
車輛在倒車進入一個巷道或兩邊已經停靠了其它車輛的停車場的車位時都會存在環境影響造成的誤報警。因為在這種情況下,絕大部分倒車的過程中,最近的檢測距離和方位都在車身的兩邊(墻面或兩邊車輛的超聲波反射),但駕駛員可以通過兩邊的反光鏡掌握兩邊的車距,駕駛員關心的是車身后面的障礙物體。所以處理器在這種環境下應該能識別并適應。
解決辦法是對車身兩邊的物體發射的距離做記錄和統計,當發現探頭一和探頭四,或者其中的一個在6個報警周期內檢測到的距離都比較恒定,或變化范圍很小,則認為處于上述環境中。于是,處理器在送出相應的消息后就不再輸出相應探頭的探測信息,只對探頭二和探頭三的檢測信息作出響應。但是如果探頭一和探頭四的檢測距離變化范圍超過設定值(±△L米),則馬上回到正常檢測的狀態機模式,兩側或某一邊的距離再次恒定后又轉到環境適應模式下。同時,環境適應模式也有一個極限設定值(0.5米),即恒定距離小于0.5米時,處理器還是回到正常檢測模式,對該探頭的檢測信息輸出報警信息。
3.4 防地面固定聲波反射處理
由于各種車輛的底盤和后保險杠的高度及斜度不一樣,再加上各倒車雷達廠家所采用的探頭種類不一樣,比如單角度的探頭發射范圍廣,所以很可能存在超聲波發射到地面后的固定反射情況,處理器必須適應并識別出是一個固定距離的干擾。
處理方法是:每次開機運行后,檢測到四個探頭在6個報警周期內收到的障礙物距離值都是一致且恒定的(誤差允許在±△L米內),則將此距離當成是地面反射干擾,以后不再響應處理,而是在設定的周期時間內等待其它有效的超聲波發射信號。
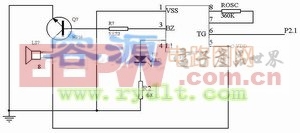
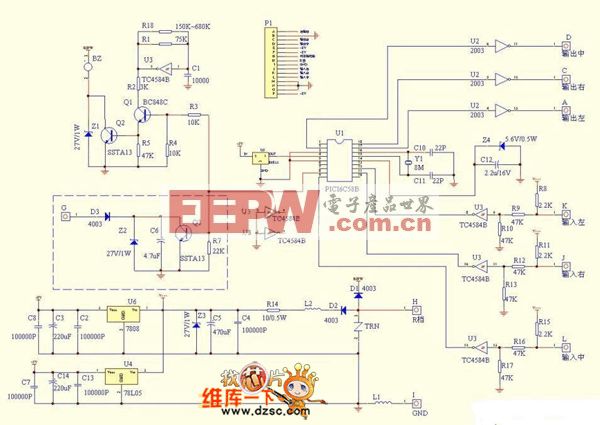
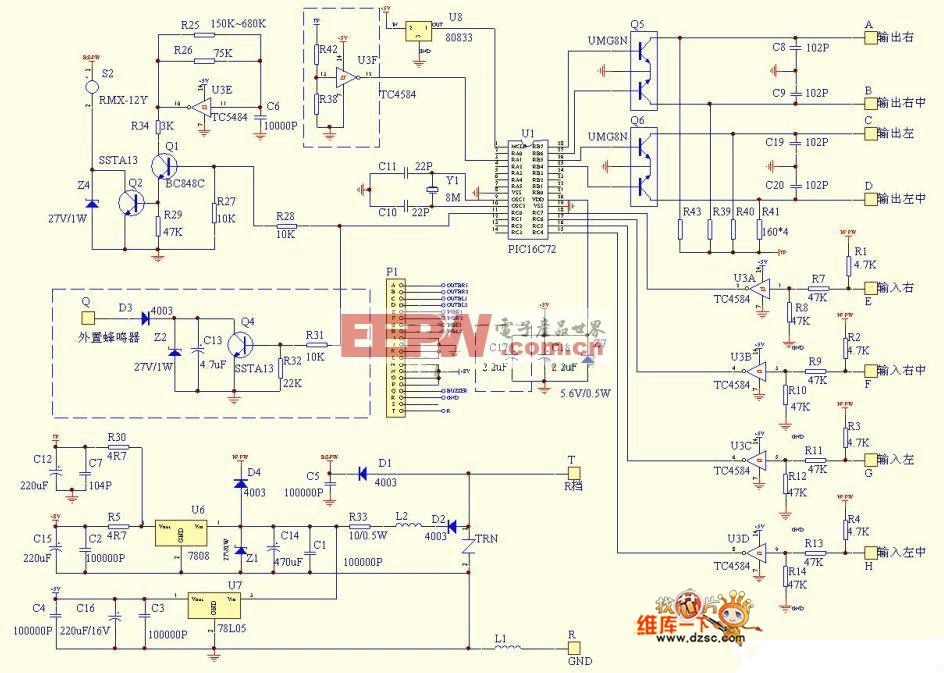
4 硬件實現
4.1 代碼實現
//+FHDR===================================================
============
// Copyright 2005,UESTC,All rights reserved.
// File Name : alarm_deal.v
// Author:Yangbing
// Release History
// Version DateAuthor Description
// 1.0 20/05/2005 initial version
//-FHDR=====================================================
`timescale 1ns/10ps
module alarm_deal (clk,resetn,mode,dm,pulse_out,pulse_back,ch_sel,mux_enable,
alarm_out,alarm_outn);
//==========================================================
==========
//input ports declaration
//===================================================
=================
……………………………………………………………………………………………………
…………………………………………………………………………………………………..
//======================end module ====================================
endmodule
//=================alarm_deal verilog file end =============================

評論