基于CAN總線和PCC的多電機消隙天線控制系統

多電機消隙天線控制系統的控制網絡結構如圖1所示,天線控制單元(即操作人機界面HMI,采用BR的PP320觸摸屏)通過內部IMA與多電機控制器(PCC的中央處理器模塊CP476)之間進行通信,實現速度指令、狀態控制和狀態信息等遠控操作。四臺直流驅動器通過CAN總線組網控制,通過SSI讀取轉臺的位置信號;天線控制系統的控保電路的信號采集等都是由多電機控制器(CP476)通過其I/O點(DM465數字量I/O模塊)實現的。這種方案不僅實現了全數字控制,而且結構簡單、接口清晰、可靠性高。可以看出多電機控制器(CP476)和CAN總線的應用是關鍵所在。
3.2 控制原理
對于四臺電動機協調控制一個轉臺來說,要實現齒輪消隙,其中兩臺要作為速度控制模式工作,作為消隙驅動的主電動機,提供與天線轉動方向一致的主動驅動力矩。另外兩臺要作為力矩控制模式工作,作為消隙驅動的從動電機,為消隙機構的齒圈提供向后的嚙合“張緊力”。
天線控制單元HMI(PP320)通過串行接口RS-232將速度指令發送給多電機控制器(CP476),多電機控制器(CP476)通過CAN總線分別對四臺直流調速器(歐陸)實現速度控制和力矩控制的切換,以實現對天線轉臺的無間隙傳動。如圖2所示。
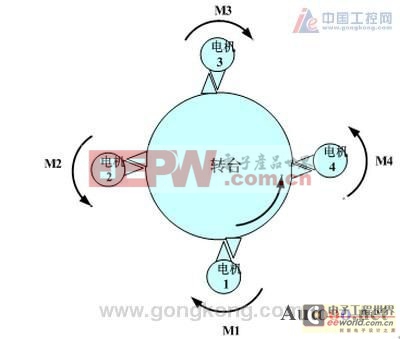
圖2 四臺電動機驅動轉臺的控制原理
當轉臺順時針轉動時,設定電機1和3為速度控制工作模式,電機2和4為電流控制工作模式。電機1和3為主動電機,電機2和4為從動電機。M1、M2、M3、M4分別代表電機1、電機2、電機3、電機4的力矩。則提供的總力矩M=(M1+M3-M2-M4)。當轉臺逆時針轉動時,則情況正好相反,電機2和4為速度控制工作模式,電機1和3為電流控制工作模式。電機2和4為主動電機,電機1和3為從動電機。提供的總力矩為M=(M2+M4-M1-M3)。
對于兩臺作電流控制模式工作的直流調速器,外部給定電流指令,使之產生與主動電機相反的力矩,保持一定的張緊力。
對于兩臺作速度控制模式工作的直流調速器,多電機控制器(CP476)接受天線控制單元的速度指令,經過處理后通過CAN總線發送給歐陸直流調速器,將與電機反饋速度比較運算后的偏差送入直流驅動器的速度環,通過力矩偏置,輸出電流信號送給電流環,經過PID運算后,把電流信號送給電機電樞。從而既實現了轉臺電動機的速度和電流閉環控制,又實現了轉臺消隙。系統控制原理框圖如圖3所示。

圖3 轉臺驅動電機控制系統原理框圖
4 系統設計
4.1 系統的硬件設計
該系統的硬件結構如圖4所示。
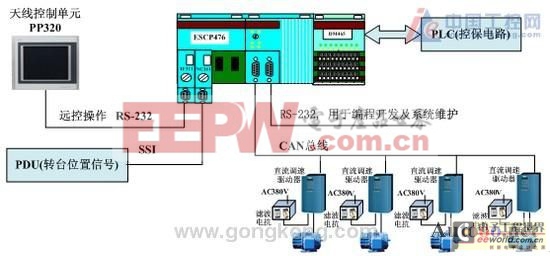
圖4 系統硬件結構










評論